
Remote Control via SCPI
Getting Started
1179459202
Version 03
(;Ý]ê2)
This manual applies to the Rohde & Schwarz products that support remote control via SCPI.
© 2023 Rohde & Schwarz GmbH & Co. KG
Muehldorfstr. 15, 81671 Muenchen, Germany
Phone: +49 89 41 29 - 0
Email: [email protected]
Internet: www.rohde-schwarz.com
Subject to change – data without tolerance limits is not binding.
R&S
®
is a registered trademark of Rohde & Schwarz GmbH & Co. KG.
All other trademarks are the properties of their respective owners.
1179.4592.02 | Version 03 | Remote Control via SCPI
The following abbreviations are used throughout this manual: R&S
®
is abbreviated as R&S.

ContentsRemote Control via SCPI
31179.4592.02 ─ 03
Contents
1 Introduction............................................................................................ 5
2 Remote control interfaces and protocols............................................ 6
2.1 VISA libraries.................................................................................................................6
2.2 LAN interface.................................................................................................................7
2.3 USB interface...............................................................................................................11
2.4 GPIB interface..............................................................................................................11
2.5 Drivers for graphical programming interfaces.........................................................13
3 SCPI command structure.................................................................... 14
3.1 Syntax for common commands.................................................................................14
3.2 Syntax for instrument-specific commands.............................................................. 15
3.3 Command parameters................................................................................................ 16
3.4 Overview of syntax elements.....................................................................................20
3.5 Structure of a command line......................................................................................21
3.6 Responses to queries.................................................................................................22
4 Instrument messages.......................................................................... 23
5 Status reporting system......................................................................24
5.1 Overview of status registers...................................................................................... 24
5.2 Structure of a status register..................................................................................... 25
5.3 Contents of the status registers................................................................................ 27
5.4 Application of the status reporting system.............................................................. 30
6 General programming recommendations..........................................33
7 Command sequence and synchronization........................................ 34
8 Programming examples...................................................................... 37
8.1 System reset................................................................................................................37
8.2 Instrument status byte................................................................................................37
8.3 Error query...................................................................................................................38

ContentsRemote Control via SCPI
41179.4592.02 ─ 03
8.4 Command synchronization........................................................................................ 38
9 Contacting customer support.............................................................41
Index......................................................................................................42

IntroductionRemote Control via SCPI
51179.4592.02 ─ 03
1 Introduction
This document provides general information on remote control of Rohde & Schwarz
products via SCPI, especially useful for unexperienced users.
For further information, refer to:
●
User manuals of your product
– The description of manual operation (GUI reference) provides direct links to
corresponding remote commands.
– For remote control interfaces and protocols supported by your instrument, refer
to chapters describing remote control basics.
– For detailed description of the remote control commands that your instrument
supports, refer to the command reference chapters.
●
www.rohde-schwarz.com/rckb: Rohde & Schwarz webpage that provides informa-
tion on instrument drivers and remote control.
●
www.github.com/Rohde-Schwarz/Examples: advanced programming examples

Remote control interfaces and protocolsRemote Control via SCPI
61179.4592.02 ─ 03
2 Remote control interfaces and protocols
Remote operation with SCPI commands automates the operation of the instrument.
Scripts or programs control the software or firmware of the instrument to execute tests
or generate signals.
SCPI stands for Standard Commands for Programmable Instruments.
SCPI compatibility
The SCPI standard is based on standard IEEE 488.2. It aims at the standardization of
instrument-specific commands, error handling and status registers. The tutorial "Auto-
matic Measurement Control - A tutorial on SCPI and IEEE 488.2" from John M. Pieper
(Rohde & Schwarz order number 0002.3536.00) offers detailed information on con-
cepts and definitions of SCPI. The instrument supports the latest SCPI version 1999.
SCPI-confirmed commands are typically explicitly marked in the command reference
chapters. Commands without SCPI label are instrument-specific. However, their syntax
follows SCPI rules. See also Chapter 3, "SCPI command structure", on page 14.
Typically, Rohde & Schwarz instruments support at least one interface for remote con-
trol via SCPI.
● VISA libraries............................................................................................................ 6
● LAN interface............................................................................................................ 7
● USB interface.......................................................................................................... 11
● GPIB interface......................................................................................................... 11
● Drivers for graphical programming interfaces......................................................... 13
2.1 VISA libraries
Virtual instruments software architecture (VISA) is a standardized software interface
library providing input and output functions to communicate with instruments. High-
level programming platforms use VISA as an intermediate abstraction layer. VISA
encapsulates the low-level function calls and thus makes the transport interface trans-
parent for the user.
A VISA installation is a prerequisite for remote control via the LAN, USB, GPIB, or
RS-232. The I/O channel is selected at initialization time via the channel-specific
address string or a VISA alias (short name). The VISA address resource strings are
typically displayed in the GUI of the instrument.
VISA has dedicated API functions (not available for socket, or serial connections). You
can use the following built-in commands:
●
Open a session with instrument - viOpen()
●
Write data to instrument - viWrite()
●
Read STB register - viReadSTB()
●
Read output buffer - viRead()
●
Wait for an occurrence of the specified event - viWaitOnEvent()
VISA libraries

Remote control interfaces and protocolsRemote Control via SCPI
71179.4592.02 ─ 03
For further information, refer to:
●
Rohde & Schwarz webpage providing the installers for a proprietary R&S VISA:
www.rohde-schwarz.com/rsvisa.
●
VISA user documentation installed with R&S VISA
●
Webpages providing examples on VISA tools:
– Rohde & Schwarz Instrument Connectivity (RSIC): https://
plugins.jetbrains.com/plugin/19828-rohde--schwarz-instrument-connectivity
– R&S VISA Tester Tool: www.rohde-schwarz.com/visa-and-tools
●
Webpages providing VISA or socket programing modules:
– RsInstrument Python package: www.pypi.org/project/RsInstrument/ recommen-
ded for the RSIC tool
– Rohde & Schwarz webpage VISA in Programming Languages: www.rohde-
schwarz.com/programming-with-visa
●
Application note 1SL374: How to communicate with R&S devices using VISA
2.2 LAN interface
Many instruments are equipped with a LAN interface that can be connected via a com-
mercial RJ-45 cable to a network with TCP/IP protocol. The TCP/IP protocol and the
associated network services are preconfigured on the instrument. Software for instru-
ment control and (for specified protocols only) the VISA program library must be instal-
led on the controlling computer.
Rohde & Schwarz instruments support LAN protocols such as VXI-11, raw socket or
the newer HiSLIP protocol. These protocols allow you to control the instrument, for
example:
●
Via C#, Python, Visual Basic programs
●
Via the Windows applications Word and Excel
●
Via National Instruments LabView, LabWindows/CVI, MATLAB
The control applications run on an external computer in the network.
VISA resource string
Only the IP address or the host name of the instrument is required to set up a connec-
tion. This information is part of the VISA resource string used to address the instru-
ment. Several instruments in the same network have different IP addresses, host
names and resource strings.
Default ports
Rohde & Schwarz instruments typically use the following ports for communication via
LAN control interface.
LAN interface

Remote control interfaces and protocolsRemote Control via SCPI
81179.4592.02 ─ 03
Table 2-1: Typical default ports of LAN protocols
LAN protocol Default port number
VXI-11 protocol TCP or UDP port: 111
TCP port: any port provided by the ONC RPC port mapper (see RFC 1833)
HiSLIP protocol TCP port: 4880
Socket communication raw socket, TCP port: 5025, 5125
RSIB protocol TCP port: 2525
mDNS / Bonjour
®
(LXI)
TCP port: 5353
2.2.1 VXI-11 protocol
The VXI-11 standard is based on the open network computing remote procedure call
(ONC RPC) protocol which in turn relies on TCP/IP as the network/transport layer. The
TCP/IP network protocol and the associated network services are preconfigured.
TCP/IP ensures connection-oriented communication, where the order of the
exchanged messages is adhered to and interrupted links are identified. With this proto-
col, messages cannot be lost.
2.2.2 HiSLIP protocol
The high-speed LAN instrument protocol (HiSLIP) is the successor protocol for VXI-11
for TCP-based instruments specified by the IVI Foundation. The protocol uses two
TCP sockets for a single connection - one for fast data transfer, the other for non-
sequential control commands (e.g. Device Clear or SRQ).
HiSLIP has the following characteristics:
●
High performance as with raw socket communication
●
Compatible IEEE 488.2 support for message exchange protocol, device clear,
serial poll, remote/local, trigger, and service request
●
Uses a single IANA registered port (4880), which simplifies the configuration of fire-
walls
●
Supports simultaneous access of multiple users by providing versatile locking
mechanisms
●
Usable for IPv6 or IPv4 networks
●
Encryption and authentication supported with HiSLIP 2.0
Using VXI-11, each operation is blocked until a VXI-11 instrument handshake returns.
Using HiSLIP, data is sent to the instrument using the "fire and forget" method with
immediate return. Thus, a successful return of a VISA operation such as viWrite()
ensure only that the command is delivered to the instrument's TCP/IP buffers. There is
no confirmation that the instrument has started or finished the requested command.
LAN interface

Remote control interfaces and protocolsRemote Control via SCPI
91179.4592.02 ─ 03
For more information, see also the application note 1MA208: Fast Remote Instrument
Control with HiSLIP.
2.2.3 Socket communication
An alternative method of remote control of the product is to establish a simple network
communication using sockets. The socket communication, also referred to as "Raw
Ethernet communication", does not necessarily require a VISA installation on the
remote controller side. It is available by default on all operating systems.
The simplest way to establish socket communication is, to use a telnet program. The
telnet program is part of every operating system and supports a communication with
the software on a command-by-command basis. For more convenience and to enable
automation by programs, user-defined sockets can be programmed.
Socket connections are established on a specially defined port. The socket address is
a combination of the IP address or the host name of the instrument and the number of
the port configured for remote-control. Typically, the products of Rohde & Schwarz use
port number 5025 for this purpose. The port is configured for communication on a com-
mand-to-command basis and for remote control from a program.
2.2.4 RSIB protocol
Note that the RSIB protocol is deprecated and HiSLIP is the future-proofed replace-
ment.
The RSIB protocol defined by Rohde & Schwarz uses the TCP/IP protocol for commu-
nication with the instrument. Remote control over RSIB is implemented on a message
level basis using the SCPI command set of the instrument.
RSIB interface functions
The RSIB library functions are adapted to the interface functions of National Instru-
ments for GPIB programming. The functions supported by the libraries are listed in the
following table.
Function Description
RSDLLibfind() Provides means for access to an instrument.
RSDLLibwrt() Sends a zero-terminated string to an instrument.
RSDLLilwrt() Sends a certain number of bytes to an instrument.
RSDLLibwrtf() Sends the contents of a file to an instrument.
RSDLLibrd() Reads data from an instrument into a string.
RSDLLilrd() Reads a certain number of bytes from an instrument.
RSDLLibrdf() Reads data from an instrument into a file.
RSDLLibtmo() Sets timeout for RSIB functions.
RSDLLibsre() Switches an instrument to the local or remote state.
LAN interface

Remote control interfaces and protocolsRemote Control via SCPI
101179.4592.02 ─ 03
Function Description
RSDLLibloc() Temporarily switches an instrument to the local state.
RSDLLibeot() Enables/disables the END message for write operations.
RSDLLibrsp() Performs a serial poll and provides the status byte.
RSDLLibonl() Sets the instrument online/offline.
RSDLLTestSrq() Checks whether an instrument has generated an SRQ.
RSDLLWaitSrq() Waits until an instrument generates an SRQ.
RSDLLSwapBytes Swaps the byte sequence for binary numeric display (only required for non-Intel
platforms).
2.2.5 LXI
LAN extensions for instrumentation (LXI) are an instrumentation platform for measuring
instruments and test systems that is based on standard Ethernet technology. LXI is
intended to be the LAN-based successor to GPIB, combining the advantages of Ether-
net with the simplicity and familiarity of GPIB.
The instrument's LXI browser interface works correctly with all W3C compliant brows-
ers. Type the instrument's host name or IP address in the address field of the browser
to reach its web GUI.
2.2.6 LAN interface messages
The IEEE Std 1174-2000 defines messages for serial interfaces to emulate interface
messages of the GPIB bus. These messages also can be used for all LAN interfaces,
especially for raw socket.
Command Long term Effect on the instrument
&ABO
Abort Aborts processing of the received commands.
&DCL
Device clear Aborts processing of the received commands and sets
the command processing software to a defined initial
state. Does not change the instrument setting.
>L
Go to local Transition to the "local" state (manual control). The instru-
ment automatically returns to remote state when a remote
command is sent UNLESS &NREN was sent before.
>R
Go to remote Enables automatic transition from local state to remote
state by a subsequent remote command (after &NREN
was sent).
&GET
Group execute trigger Triggers a previously active instrument function (e.g. a
sweep). The effect of the command is the same as the
effect of a pulse at the external trigger signal input.
&LLO
Local lockout Disables transition from remote control to manual control
via the front panel keys.
LAN interface

Remote control interfaces and protocolsRemote Control via SCPI
111179.4592.02 ─ 03
Command Long term Effect on the instrument
&NREN
Not remote enable Disables automatic transition from local state to remote
state by a subsequent remote command. To reactivate
automatic transition, use >R.
&POL
Serial poll Starts a serial poll.
2.3 USB interface
For remote control via a USB connection, the PC is connected to the instrument via the
USB type B interface of the instrument. A USB connection requires the VISA library to
be installed. VISA detects and configures the Rohde & Schwarz instrument automati-
cally when the USB connection is established. You do not have to enter an address
string or install a separate driver.
2.4 GPIB interface
(IEC 625 / IEEE 418 bus interface)
To be able to control the instrument via the GPIB bus, the instrument and the controller
must be linked by a GPIB bus cable. A GPIB bus card, the card drivers and the pro-
gram libraries for the programming language used must be provided in the controller.
The controller must address the instrument via the GPIB bus address.
Notes and conditions
In connection with the GPIB interface, note the following:
●
Up to 15 instruments can be connected
●
The maximum permissible cable length is product-specific.
●
A wired "OR"-connection is used if several instruments are connected in parallel.
●
Any connected IEC-bus cables must be terminated by an instrument or controller.
2.4.1 GPIB instrument address
To operate the instrument via remote control, it must be addressed using the GPIB
address. For remote control, addresses 0 through 30 are allowed. The GPIB address is
maintained after a reset of the instrument settings.
2.4.2 GPIB interface messages
Interface messages are transmitted to the instrument on the data lines, with the atten-
tion line (ATN) being active (LOW). These messages are used for communication
between the controller and the instrument and can only be sent by a computer, which
GPIB interface

Remote control interfaces and protocolsRemote Control via SCPI
121179.4592.02 ─ 03
has the function of a GPIB bus controller. GPIB interface messages can be further sub-
divided into:
●
Universal commands: act on all instruments connected to the GPIB bus without
previous addressing
●
Addressed commands: only act on instruments previously addressed as listeners
2.4.2.1 Universal commands
Universal commands are encoded in the range 10 through 1F hex. They affect all
instruments connected to the bus and do not require addressing.
Command Long term Effect on the instrument
DCL
Device clear Aborts the processing of the commands received and
sets the command processing software to a defined initial
state. Does not change the instrument settings.
IFC
Interface clear
*)
Resets the interfaces to the default setting.
LLO
Local lockout The "Local" softkey is disabled. Manual operation is no
longer available until GTL is executed.
SPE
Serial poll enable Ready for serial poll.
SPD
Serial poll disable End of serial poll.
PPU
Parallel poll unconfigure End of the parallel-poll state.
*) IFC is not a real universal command, it is sent via a separate line; however, it also affects all instruments
connected to the bus and does not require addressing
2.4.2.2 Addressed commands
Addressed commands are encoded in the range 00 through 0F hex. To send these
commands, the GPIB controller must address the instrument (GPIB listeners) via GPIB
bus channel.
Command Long term Effect on the instrument
GET
Group execute trigger Triggers a previously active instrument function (e.g. a
sweep). The effect of the command is the same as the
effect of a pulse at the external trigger signal input.
GTL
Go to local Transition to the "local" state (manual control).
GTR
REN
Go to remote
Remote enable
Transition to the "remote" state (remote control).
PPC
Parallel poll configure Configures the instrument for parallel poll.
SDC
Selected device clear Aborts the processing of the commands received and
sets the command processing software to a defined initial
state. Does not change the instrument setting.
GPIB interface

Remote control interfaces and protocolsRemote Control via SCPI
131179.4592.02 ─ 03
2.5 Drivers for graphical programming interfaces
Many Rohde & Schwarz customers prefer graphical programming interfaces when writ-
ing applications for the instruments. Examples for such interfaces are LabVIEW and
LabWindows/CVI from National Instruments or IVI.NET from Rohde & Schwarz.
Rohde & Schwarz provides software device drivers free of charge for this purpose. The
drivers are available for download from www.rohde-schwarz.com/drivers-vs-plain-scpi.
Drivers for graphical programming interfaces

SCPI command structureRemote Control via SCPI
141179.4592.02 ─ 03
3 SCPI command structure
SCPI commands consist of a header and, usually, one or more parameters. The
header can consist of several mnemonics (keywords). The header and the parameters
are separated by a "white space", for example a blank. Queries are formed by append-
ing a question mark directly to the header.
A command is either instrument-specific or instrument-independent (common com-
mand). Common and instrument-specific commands differ in their syntax.
● Syntax for common commands...............................................................................14
● Syntax for instrument-specific commands.............................................................. 15
● Command parameters............................................................................................ 16
● Overview of syntax elements.................................................................................. 20
● Structure of a command line................................................................................... 21
● Responses to queries............................................................................................. 22
3.1 Syntax for common commands
Common commands consist of a header preceded by an asterisk (*), and possibly one
or more parameters.
Table 3-1: Examples of common commands
Command Long term Effect on the instrument
*RST
Reset Command Resets the instrument.
*ESE
Standard Event Status Enable
Command
Sets the bits of the standard event status enable regis-
ters.
*ESR?
Standard Event Status Regis-
ter Query
Queries the contents of the standard event status regis-
ter.
*IDN?
Identification Query Queries the instrument identification string.
Syntax for common commands

SCPI command structureRemote Control via SCPI
151179.4592.02 ─ 03
3.2 Syntax for instrument-specific commands
Not all commands used in the following examples are necessarily implemented in your
instrument. For demonstration purposes only, assume the existence of the following
commands for this description:
●
DISPlay[:WINDow<1...4>]:MAXimize <Boolean>
●
FORMat:READings:DATA <type>[,<length>]
●
HCOPy:DEVice:COLor <Boolean>
●
HCOPy:DEVice:CMAP:COLor:RGB <red>,<green>,<blue>
●
HCOPy[:IMMediate]
●
HCOPy:ITEM:ALL
●
HCOPy:ITEM:LABel <string>
●
HCOPy:PAGE:DIMensions:QUADrant<n>
●
HCOPy:PAGE:ORIentation LANDscape | PORTrait
●
HCOPy:PAGE:SCALe <numeric value>
●
MMEMory:COPY <file_source>,<file_destination>
●
SENSE:BANDwidth|BWIDth[:RESolution] <numeric_value>
●
SENSe:FREQuency:STOP <numeric value>
●
SENSe:LIST:FREQuency <numeric_value>{,<numeric_value>}
● Long and short form................................................................................................15
● Numeric suffixes......................................................................................................16
● Optional mnemonics............................................................................................... 16
3.2.1 Long and short form
Most mnemonics have a long form and a short form. Either the long form or the short
form can be entered per mnemonic. Other abbreviations are not permitted. The short
form is marked by uppercase letters.
The uppercase and lowercase notation only serves to distinguish the two forms in the
documentation. The instrument itself is case-insensitive.
Example:
The following command notations are equivalent:
●
HCOPy:DEVice:COLor ON
●
HCOP:DEV:COL ON
●
HCOPy:DEV:COLor ON
●
hcop:device:color on
Syntax for instrument-specific commands

SCPI command structureRemote Control via SCPI
161179.4592.02 ─ 03
3.2.2 Numeric suffixes
If a command can be applied to multiple instances of an object, the required instances
are specified by a suffix. Numeric suffixes are indicated by angular brackets (<1...4>,
<n>, <i>) and are replaced by an integer value in the command. Entries without a suffix
are interpreted as having the suffix 1.
Example:
Definition: HCOPy:PAGE:DIMensions:QUADrant<n>
Command: HCOP:PAGE:DIM:QUAD2
This command refers to the quadrant 2.
Different numbering in remote control
For remote control, the suffix can differ from the number of the corresponding selection
used in manual operation.
SCPI prescribes that suffix counting starts with 1. In manual operation, counting starts
sometimes with 0. Then you have 1 to n in SCPI and 0 to n-1 in manual operation.
3.2.3 Optional mnemonics
Some commands have optional mnemonics. Such mnemonics can be inserted or omit-
ted. They are marked by square brackets in the documentation.
Example:
Definition: HCOPy[:IMMediate]
Command HCOP:IMM is equivalent to HCOP.
Optional mnemonics with numeric suffixes
Do not omit an optional mnemonic if it includes a numeric suffix that is relevant for the
effect of the command.
Example:
Definition:DISPlay[:WINDow<1...4>]:MAXimize <Boolean>
Command: DISP:MAX ON refers to window 1.
To refer to a window other than 1, you must include the optional WINDow parameter
with the suffix for the required window.
DISP:WIND2:MAX ON refers to window 2.
3.3 Command parameters
Many commands are supplemented by a parameter or a list of parameters. The
parameters must be separated from the header by a "white space" (ASCII code 0 to 9,
Command parameters
SCPI command structureRemote Control via SCPI
171179.4592.02 ─ 03
11 to 32 decimal, e.g. a blank). If several parameters are specified in a command, they
are separated by a comma.
The parameters required for each command and the allowed range of values are
specified in the command description.
● Numeric values....................................................................................................... 17
● Special numeric values........................................................................................... 18
● Boolean parameters................................................................................................18
● Text parameters...................................................................................................... 19
● Character strings.....................................................................................................19
● Block data............................................................................................................... 19
3.3.1 Numeric values
Numeric values can be entered in any form, i.e. with sign, decimal point and exponent.
Values exceeding the resolution of the instrument are rounded up or down. The man-
tissa can comprise up to 255 characters, the exponent must lie inside the value range
-32000 to 32000. The exponent is introduced by an "E" or "e". Entry of the exponent
alone is not allowed.
Example:
SENS:FREQ:STOP 1500000 = SENS:FREQ:STOP 1.5E6
Units
For physical quantities, the unit can be entered. If the unit is missing, the basic unit is
used.
Table 3-2: Examples of units
Units in commands Meaning
HZ, KHZ, MHZ, GHZ
Hz, kHz, MHz, GHz
W, MIW, UW
DBW, DBM
W, mW, µW
dBW, dBm
H, M, S, MS, US
hour, minute, s, ms, µs
Example:
SENSe:FREQ:STOP 1.5GHz = SENSe:FREQ:STOP 1.5E9
Some settings allow relative values to be stated in percent. According to SCPI, this unit
is represented by the PCT string.
Example:
HCOP:PAGE:SCAL 90PCT
Command parameters

SCPI command structureRemote Control via SCPI
181179.4592.02 ─ 03
3.3.2 Special numeric values
The following mnemonics are special numeric values. In the response to a query, the
numeric value is provided.
●
MIN/MAX
Minimum and maximum of the parameter range, setting and query possible
●
DEF
Default, preset value as called by the *RST command, setting and query possible
●
KEEP
Keeps a value unchanged. Example: To set the third value in a list of five parame-
ters to 10, use KEEP,KEEP,10,KEEP,KEEP. Setting only.
●
UP/DOWN
Increases or reduces the numeric value by one step, setting only
●
INF/NINF
INFinity and Negative INFinity, representing the numeric values 9.9E37 or -9.9E37.
Response value only.
●
NAN
Not A Number represents the value 9.91E37. Response value only.
This value is not defined. Possible causes are the division of zero by zero, the sub-
traction of infinite from infinite and the representation of missing values.
Example:
Set to max value: SENSe:LIST:FREQ MAXimum
Query the set value: SENS:LIST:FREQ?
Returned value: 3.5E9
Queries for special numeric values
The numeric values associated to MAXimum/MINimum/DEFault can be queried by
adding the corresponding mnemonic after the question mark.
Example: SENSe:LIST:FREQ? MAXimum
Returns the maximum numeric value as a result.
3.3.3 Boolean parameters
Boolean parameters represent two states. The "on" state (logically true) is represented
by ON or a numeric value 1. The "off" state (logically untrue) is represented by OFF or
the numeric value 0. The numeric values are provided as the response for a query.
Example:
Setting command: HCOPy:DEV:COL ON
Query: HCOPy:DEV:COL?
Response: 1
Command parameters

SCPI command structureRemote Control via SCPI
191179.4592.02 ─ 03
3.3.4 Text parameters
Text parameters observe the syntactic rules for mnemonics, i.e. they can be entered
using a short or long form. A query returns the short form of the text.
Example:
Setting command: HCOPy:PAGE:ORIentation LANDscape
Query: HCOP:PAGE:ORI?
Response: LAND
3.3.5 Character strings
Enter strings always in quotation marks (' or ").
Example:
HCOP:ITEM:LABel "Test1"
HCOP:ITEM:LABel 'Test1'
3.3.6 Block data
Block data is a format which is suitable for the transmission of large amounts of data. A
block data parameter has the following structure:
#<length_digits><length><data>
Example: FORMat:READings:DATA #45168xxxxxxxx
●
# introduces the data block
●
<length_digits> = 4 means that the following four digits describe the length of the
data block
●
<length> = 5168 means that the length of the data block is 5168 bytes.
●
<data> = xxxxxxxx, the 5168 data bytes
During transmission of the data bytes, all end or other control signs are ignored until all
bytes are transmitted.
#0 specifies a data block of indefinite length. The use of the indefinite format requires a
NL^END message to terminate the data block. This format is useful when the length of
the transmission is not known or if speed or other considerations prevent segmentation
of the data into blocks of definite length.
Some instruments support the Rohde & Schwarz specific extension
#(<length>)data, for example #(3)abc. This form allows to send block data bigger
than 999.999.999 bytes.
Command parameters

SCPI command structureRemote Control via SCPI
201179.4592.02 ─ 03
3.4 Overview of syntax elements
The following tables provide an overview of the syntax elements and special charac-
ters.
Table 3-3: Syntax elements
: The colon separates the mnemonics of a command.
; The semicolon separates two commands of a command line. It does not change the path.
, The comma separates several parameters of a command.
? The question mark defines a query.
* The asterisk defines a common command.
'
"
Quotation marks introduce a string and terminate it. Both single and double quotation marks are pos-
sible.
# The hash symbol introduces the following numeric formats:
●
Binary: #B10110
●
Octal: #O7612
●
Hexadecimal: #HF3A7
●
Block data: #21312
A "white space" (ASCII-Code 0 to 9, 11 to 32 decimal, e.g. blank) separates the header from the
parameters.
Overview of syntax elements

SCPI command structureRemote Control via SCPI
211179.4592.02 ─ 03
Table 3-4: Special characters
|
Parameters
A pipe in parameter definitions indicates alternative possibilities in the sense of "or". The effect of the
command differs depending on which parameter is used.
Example:
Definition:HCOPy:PAGE:ORIentation LANDscape | PORTrait
Command HCOP:PAGE:ORI LAND specifies landscape orientation
Command HCOP:PAGE:ORI PORT specifies portrait orientation
Mnemonics
A selection of mnemonics with an identical effect exists for several commands. These mnemonics are
indicated in the same line; they are separated by a pipe. Only one of these mnemonics needs to be
included in the header of the command. The effect of the command is independent of which of the
mnemonics is used.
Example:
Definition SENSE:BANDwidth|BWIDth[:RESolution] <numeric_value>
The two following commands with identical meaning can be created:
SENS:BAND:RES 1
SENS:BWID:RES 1
[ ] Mnemonics in square brackets are optional and can be inserted into the header or omitted.
Example: HCOPy[:IMMediate]
HCOP:IMM is equivalent to HCOP
{ } Parameters in curly brackets are optional and can be inserted once or several times, or omitted.
Example: SENSe:LIST:FREQuency <numeric_value>{,<numeric_value>}
The following are valid commands:
SENS:LIST:FREQ 10
SENS:LIST:FREQ 10,20
SENS:LIST:FREQ 10,20,30,40
3.5 Structure of a command line
A command line can consist of one or several commands. It is terminated by one of the
following:
●
<New Line>
●
<New Line> with EOI
●
EOI together with the last data byte
A command line can contain several commands, separated by a semicolon. If the next
command starts with a different mnemonic, the semicolon is followed by a colon.
Example:
MMEM:COPY "Test1","MeasurementXY";:HCOP:ITEM ALL
This command line contains two commands, starting with different mnemonics. Both
commands must be specified completely, without omitting mnemonics.
Structure of a command line

SCPI command structureRemote Control via SCPI
221179.4592.02 ─ 03
Example:
HCOP:ITEM ALL;:HCOP:IMM
This command line contains two commands, starting with the same mnemonic. In that
case, you can abbreviate the second command.
Omit the common mnemonics and the colon before the command:
HCOP:ITEM ALL;IMM
Example:
HCOP:ITEM ALL
HCOP:IMM
A new command line always begins with the first mnemonic.
3.6 Responses to queries
A query is defined for each setting command, unless explicitly specified otherwise. It is
formed by adding a question mark to the associated setting command.
The following rules apply to the responses:
●
The requested parameter is transmitted without a header.
Example: HCOP:PAGE:ORI?
Response: LAND
●
Maximum values, minimum values and all other quantities that are requested via
a special text parameter are returned as numeric values.
Example: SENSe:FREQuency:STOP? MAX
Response: 3.5E9
●
Numeric values are returned without a unit. Physical quantities refer to the basic
unit or to the unit defined by the Unit command. The response 3.5E9 in the previ-
ous example stands for 3.5 GHz.
If you add a unit to the query, this unit is used for the response.
Example: SENSe:FREQuency:STOP? GHz
Response: 3.5 for 3.5 GHz
●
Truth values (Boolean values) are returned as 0 (for OFF) and 1 (for ON).
Example:
Setting command: HCOPy:DEV:COL ON
Query: HCOPy:DEV:COL?
Response: 1
●
Text (character data) is returned in the short form.
Example:
Setting command: HCOPy:PAGE:ORIentation LANDscape
Query: HCOP:PAGE:ORI?
Response: LAND
●
Invalid numerical results
Sometimes, particularly when a result consists of multiple numeric values, invalid
values are returned as 9.91E37 (not a number).
Responses to queries

Instrument messagesRemote Control via SCPI
231179.4592.02 ─ 03
4 Instrument messages
In contrary to interface messages such as LAN interface messages or GPIB interface
messages, instrument messages are employed in the same way for all interfaces.
There are different types of instrument messages, depending on the direction they are
sent:
●
Commands
●
Instrument responses
The structure and syntax of the instrument messages are described in Chapter 3,
"SCPI command structure", on page 14.
Commands
Commands (program messages) are messages that the controller sends to the instru-
ment. They operate the instrument functions and request information. The commands
are subdivided according to two criteria:
●
According to the effect on the instrument:
– Setting commands cause instrument settings such as a reset of the instru-
ment or setting the frequency.
– Queries cause data to be provided for remote control, for example, for identifi-
cation of the instrument or polling a parameter value. Queries are formed by
appending a question mark directly to the command header.
●
According to the definition of commands in standards:
– Common commands: Their function and syntax are precisely defined in stan-
dard IEEE 488.2. They are employed identically on all instruments (if imple-
mented). They are used for functions such as managing the standardized sta-
tus registers, resetting the instrument, and performing a self-test.
– Instrument control commands depend on the features of the instrument,
such as frequency settings. Many of these commands have also been standar-
dized by the SCPI committee.
In some manuals, these commands are marked as "SCPI compliant" in the
command reference chapters. Commands without this SCPI label are instru-
ment-specific. However, their syntax follows SCPI rules as permitted by the
standard.
Instrument responses
Instrument responses (response messages and service requests) are messages that
the instrument sends to the controller after a query. Responses can contain measure-
ment results, instrument settings and information on the instrument status.

Status reporting systemRemote Control via SCPI
241179.4592.02 ─ 03
5 Status reporting system
The status reporting system stores all information on the current operating state of the
instrument, and on errors which have occurred. This information is stored in the status
registers and in the error queue. Both can be queried via STATus... commands.
● Overview of status registers....................................................................................24
● Structure of a status register...................................................................................25
● Contents of the status registers.............................................................................. 27
● Application of the status reporting system.............................................................. 30
5.1 Overview of status registers
The following figure shows the hierarchy of status registers.
Introduction of the registers:
●
STB, SRE: The status byte (STB) register is at the highest level of the status
reporting system. The mask register service request enable (SRE) is associated
with the STB as its ENABle part if the STB is structured according to SCPI.
Overview of status registers
Status reporting systemRemote Control via SCPI
251179.4592.02 ─ 03
The STB provides a rough overview of the instrument status, collecting the infor-
mation of the lower-level registers. See also Chapter 5.3.1, "STB and SRE",
on page 27.
The STB receives its information from:
– ESB: The summary bit of standard event status register indicates any enabled
bit in the standard event status register (ESR). The standard event status
enable (ESE) register is used as the ENABle part of the ESR. Refer to Chap-
ter 5.3.3, "ESR and ESE", on page 29.
– Output buffer: Contains the messages that the instrument returns to the con-
troller. It is not part of the status reporting system but determines the value of
the MAV bit in the STB.
– Error/event queue: Refer to Chapter 5.4.5, "Error queue", on page 32.
– Standard operation event status and questionable event status registers
(STATus:QUEStionable, STATus:OPERation): defined by SCPI and con-
tain detailed information on the instrument.
●
IST, PPE: The individual status (IST) flag combines the entire instrument status in a
single bit. The parallel poll enable (PPE) register is associated to the IST flag.
Refer to Chapter 5.3.2, "IST flag and PPE", on page 28.
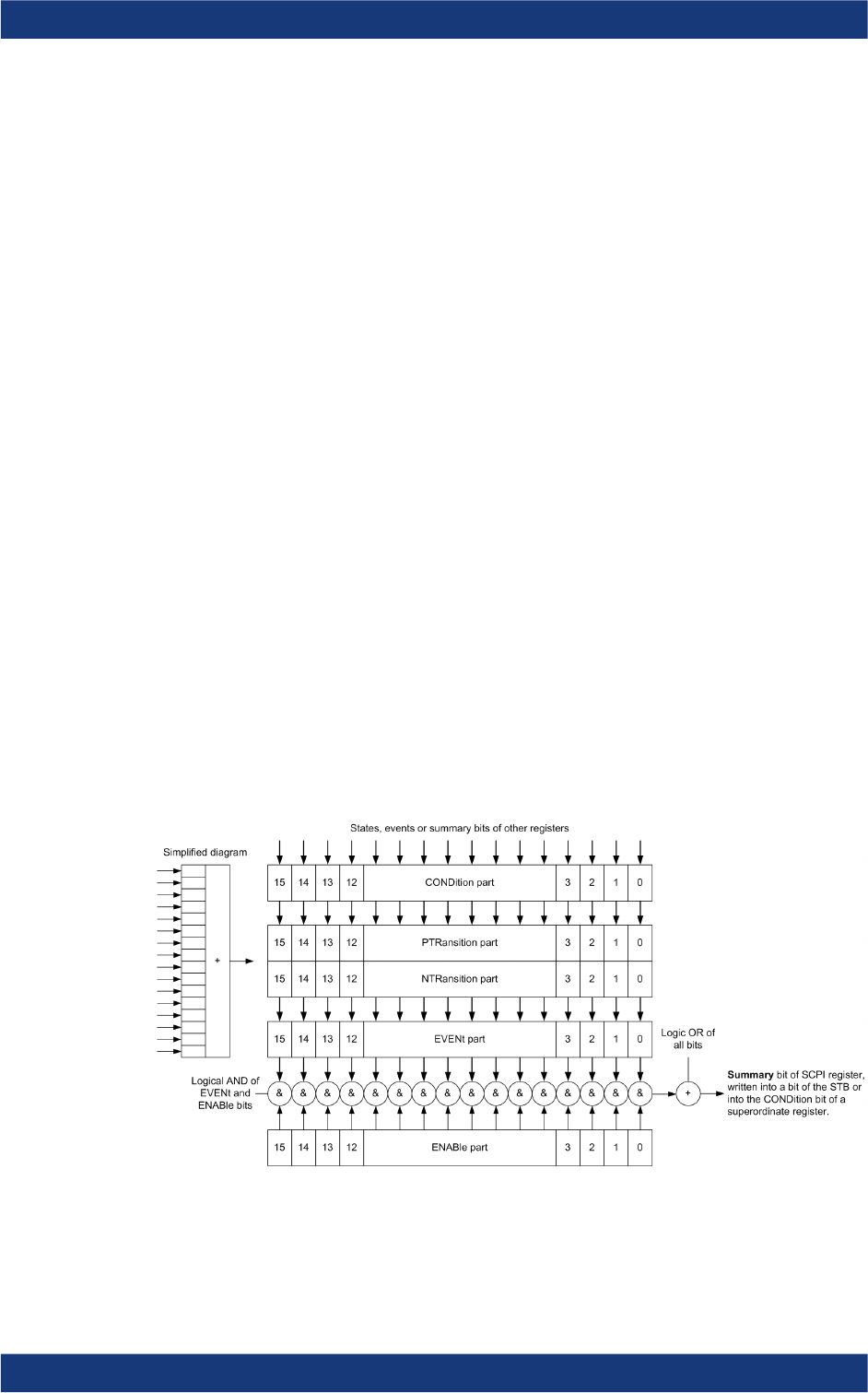
5.2 Structure of a status register
Each SCPI status register consists of five parts. Each part has a width of 16 bits or 8
bits and has different functions. The individual bits are independent of each other. Each
hardware status is assigned a bit number, which is valid for all five parts. The most sig-
nificant bit (bit 15 or 7) is set to zero for all parts. Thus, the contents of the register
parts can be processed by the controller as positive integers.
Figure 5-1: The status-register model
Structure of a status register

Status reporting systemRemote Control via SCPI
261179.4592.02 ─ 03
Description of the five status register parts
The five parts of a SCPI status register have different properties and functions:
●
CONDition
The CONDition part is written directly by the hardware or it mirrors the sum bit of
the next lower register. Its contents reflect the current instrument status. This regis-
ter part can only be read, but not written into or cleared. Its contents are not affec-
ted by reading.
●
PTRansition / NTRansition
The two transition register parts define which state transition of the CONDition
part (none, 0 to 1, 1 to 0 or both) is stored in the EVENt part.
The Positive-TRansition part acts as a transition filter. When a bit of the
CONDition part is changed from 0 to 1, the associated PTR bit decides whether
the EVENt bit is set to 1.
– PTR bit =1: the EVENt bit is set.
– PTR bit =0: the EVENt bit is not set.
This part can be written into and read as required. Its contents are not affected by
reading.
The Negative-TRansition part also acts as a transition filter. When a bit of the
CONDition part is changed from 1 to 0, the associated NTR bit decides whether
the EVENt bit is set to 1.
– NTR bit =1: the EVENt bit is set.
– NTR bit =0: the EVENt bit is not set.
This part can be written into and read as required. Its contents are not affected by
reading.
●
EVENt
The EVENt part indicates whether an event has occurred since the last reading, it
is the "memory" of the condition part. It only indicates events passed on by the
transition filters. It is permanently updated by the instrument. This part can only be
read by the user. Executing the *CLS command or reading the register clears it.
This part is often equated with the entire register.
●
ENABle
The ENABle part determines whether the associated EVENt bit contributes to the
sum bit (see below). Each bit of the EVENt part is combined with the associated
ENABle bit by a logical AND operation (symbol '&'). The results of all logical opera-
tions of this part are passed on to the sum bit via an "OR" function (symbol '+').
ENABle bit = 0: the associated EVENt bit does not contribute to the sum bit
ENABle bit = 1: if the associated EVENt bit is "1", the sum bit is set to "1" as well.
This part can be written into and read by the user as required. Its contents are not
affected by reading or *CLS command.
Sum bit
The sum bit is obtained from the EVENt and ENABle part for each register. The result
is then entered into a bit of the CONDition part of the higher-order register.
Structure of a status register

Status reporting systemRemote Control via SCPI
271179.4592.02 ─ 03
The instrument automatically generates the sum bit for each register. Thus an event
can lead to a service request throughout all levels of the hierarchy.
5.3 Contents of the status registers
The individual status registers are used to report different classes of instrument states
or errors. The following status registers belong to the general model described in IEEE
488.2:
●
The status byte (STB) gives a rough overview of the instrument status.
●
The IST flag combines the entire status information into a single bit that can be
queried in a parallel poll.
●
The event status register (ESR) indicates general instrument states.
The contents of the following status registers are instrument-specific and not described
in this document:
●
The STATus:OPERation register contains conditions which are part of the instru-
ment's normal operation.
●
The STATus:QUEStionable register indicates whether the data currently being
acquired is of questionable quality.
5.3.1 STB and SRE
The status byte (STB) provides a rough overview of the instrument status by collecting
the pieces of information of the lower registers. The STB represents the highest level
within the SCPI hierarchy. The status byte can be read with a dedicated VISA function
viReadSTB().
The status byte (STB) is linked to the service request enable (SRE) register on a bit-
by-bit basis.
*SRE
*STB? MSS ESB MAV QUES ERR n/a n/aOPER
STAT:OPER? →
*ESR? →
viRead() →
STAT:QUES? →
SYST:ERR? →
viReadSTB()
●
The STB corresponds to the EVENt part of a SCPI register, it indicates general
instrument events. This register is cleared when it is read.
A special feature is that bit 6 acts as the summary bit of the remaining bits of the
status byte.
Contents of the status registers

Status reporting systemRemote Control via SCPI
281179.4592.02 ─ 03
●
The SRE corresponds to the ENABle part of a SCPI register. If a bit is set in the
SRE and the associated bit in the STB changes from 0 to 1, a service request
(SRQ) is generated. Also VISA can call Service Request Handler using a function
viInstallHandler().
Bit 6 of the SRE is ignored, because it corresponds to the summary bit of the STB.
Table 5-1: Bits in STB register
Bit Weight Meaning
2 4 Error queue summary
This bit is set when an entry is made in the error or event queue.
3 8 Questionable register summary
The questionable status summary bit indicates a questionable instrument status, which
can be further pinned down by polling the QUEStionable register.
4 16 MAV bit
The message available bit is set if a message is available and can be read from the out-
put buffer. The output buffer can be read with a VISA function viRead().
This bit can be used to transfer data automatically from the instrument to the controller.
5 32 ESB bit
This summary bit of standard event status register; set if one of the bits in the standard
event status (ESR) register is set and enabled in the standard event enable (ESE) regis-
ter.
Setting of this bit implies an error or an event which can be further pinned down by poll-
ing the event status register.
6 64 MSS bit
The master summary status bit is set if one of the other bits of the STB is set together
with its mask bit in the SRE register.
7 128 Operation status summary
This bit is set if an EVENt bit is set in the OPERation status register and the associated
ENABle bit is set to 1. A set bit indicates that the instrument is just performing an action.
The type of action can be determined by querying the STATus:OPERation status regis-
ter.
Related common commands
The STB is read out using the *STB? command or a serial poll.
The SRE can be set using the *SRE command and read using the *SRE? command.
5.3.2 IST flag and PPE
Note, that the sophisticated parallel poll function is only useful with GPIB interfaces
and requires traditional GPIB drivers.
Similar to the service request (SRQ), the IST flag combines the entire status informa-
tion in a single bit. It can be queried via a parallel poll.
The parallel poll enable (PPE) register determines which bits of the STB contribute to
the IST flag. The bits of the STB are combined via a logical AND operation with the
Contents of the status registers

Status reporting systemRemote Control via SCPI
291179.4592.02 ─ 03
corresponding bits of the PPE. In contrast to the SRE, bit 6 is also considered. The
resulting bits are combined via an OR operation to determine the IST flag.
Related common commands
The IST flag is queried using the *IST? command.
The PPE can be set using *PRE and read using the *PRE? command.
5.3.3 ESR and ESE
The event status register (ESR) indicates general instrument states. It is linked to the
standard event status enable (ESE) register on a bit-by-bit basis.
●
The ESR corresponds to the CONDition part of a SCPI register indicating the cur-
rent instrument state. However, reading the ESR deletes the contents.
●
The ESE corresponds to the ENABle part of a SCPI register. If a bit is set in the
ESE and the associated bit in the ESR changes from 0 to 1, the ESB bit in the sta-
tus byte is set.
Table 5-2: Bits in ESR register
Bit Weight Meaning
0 1 Operation complete
This bit is set on receipt of the *OPC command after all previous commands have been
executed.
1 2 Request control
This bit is set if the instrument requests the controller function. Example: The instrument
sends a hardcopy to a printer or a plotter via the IEC-bus.
2 4 Query error
This bit is set if the controller wants to read data from the instrument without having sent
a query. It is also set if the controller does not fetch requested data and sends new
instructions to the instrument instead. The cause is often a query which is faulty and
hence cannot be executed.
3 8 Device-dependent error
This bit is set if a device-dependent error occurs. An error message with a number
between -300 and -399 or a positive error number, which describes the error in greater
detail, is entered into the error queue.
4 16 Execution error
This bit is set if a received command is syntactically correct, but cannot be performed for
other reasons. An error message with a number between -200 and -300, which describes
the error in greater detail, is entered into the error queue.
5 32 Command error
This bit is set if a command which is undefined or syntactically incorrect is received. An
error message with a number between -100 and -200, which describes the error in
greater detail, is entered into the error queue.
Contents of the status registers

Status reporting systemRemote Control via SCPI
301179.4592.02 ─ 03
Bit Weight Meaning
6 64 User request
This bit is set when the LOCAL key is selected on the instrument, i. e. when the instru-
ment is switched to manual control.
7 128 Power on (supply voltage on)
This bit is set when the instrument is switched on.
Related common commands
The event status register (ESR) can be queried using *ESR? command.
The standard event status enable (ESE) register can be set using the *ESE command
and read using *ESE? command.
5.4 Application of the status reporting system
The purpose of the status reporting system is to monitor the status of one or several
instruments in a test system. For this purpose, the controller must receive and evaluate
the information of all instruments. The following standard methods described in the fol-
lowing chapters are used:
● Service request....................................................................................................... 30
● Serial poll................................................................................................................ 31
● Parallel poll..............................................................................................................31
● Query of an instrument status.................................................................................31
● Error queue............................................................................................................. 32
5.4.1 Service request
The instrument can send a service request (SRQ) to the controller. A service request is
a request for information, advice or treatment by the controller. Usually this service
request initiates an interrupt at the controller, to which the control program can react
appropriately.
An SRQ is always initiated if one or several of bits 2, 3, 4, 5 or 7 of the status byte are
set and enabled in the SRE. Each of these bits combines the information of a further
register, the error queue or the output buffer.
The ENABle parts of the status registers can be set such that arbitrary bits in an arbi-
trary status register initiate an SRQ. To use service request effectively, all bits in the
enable registers SRE and ESE must be set to "1".
Use of the command *OPC to generate an SRQ at the end of a sweep
1. *ESE 1: Set bit 0 in the ESE (operation complete).
2. *SRE 32: Set bit 5 in the SRE (ESB bit). See also Table 5-1).
Application of the status reporting system

Status reporting systemRemote Control via SCPI
311179.4592.02 ─ 03
3. *INIT;*OPC: Generate an SRQ after operation complete.
When all commands preceding *OPC have been completed, the instrument gener-
ates an SRQ.
5.4.2 Serial poll
In a serial poll, the controller queries the status bytes of all instruments in the bus sys-
tem, one after another, to find out who sent an SRQ and why. The query is implemen-
ted using interface messages, so it is faster than a poll via the command *STB.
The serial poll method is defined in IEEE 488.1 and used to be the only standard pos-
sibility for different instruments to poll the status byte. The method also works for
instruments which do not adhere to SCPI or IEEE 488.2.
The serial poll is used to obtain a fast overview of the state of several instruments con-
nected to the controller.
5.4.3 Parallel poll
Note, that the sophisticated parallel poll function is only useful with GPIB interfaces
and requires traditional GPIB drivers.
In a parallel poll, the controller requests up to eight instruments to set the data line allo-
cated to each instrument to a logical "0" or "1".
The SRE register determines the conditions under which an SRQ is generated. In addi-
tion, there is a parallel poll enable register (PPE). This register is combined with the
status byte (STB) by a logical AND operation bit by bit, considering bit 6 as well. The
results are combined by a logical OR operation. The result is possibly inverted and
then sent as a response to the parallel poll of the controller. The result can also be
queried without parallel poll using the *IST? command.
Initially, you must configure the instrument to use the parallel poll using the PPC com-
mand. This command allocates a data line to the instrument and determines whether
the response is to be inverted. To execute the parallel poll itself, use PPE.
See also Chapter 5.3.2, "IST flag and PPE", on page 28.
The parallel poll method is used to find out quickly which of the instruments connected
to the controller sent a service request. To this effect, SRE and PPE must be set to the
same value.
5.4.4 Query of an instrument status
You can read each part of any status register using queries. There are two types of
commands:
●
The common commands *ESR?, *IDN?, *IST?, *STB? query the higher-level
registers.
Application of the status reporting system

Status reporting systemRemote Control via SCPI
321179.4592.02 ─ 03
●
The commands of the STATus system query the SCPI registers (e.g.
STATus:QUEStionable... and STATus:OPERation...).
The returned value is always a decimal number that represents the bit pattern of the
queried register. This number is evaluated by the controller program.
Queries are used after an SRQ to obtain more detailed information on the cause of the
SRQ.
5.4.4.1 Decimal representation of a bit pattern
The STB and ESR registers contain 8 bits, the SCPI registers contain 16 bits. The con-
tents of a status register are specified and transferred as a single decimal number.
Each bit is assigned a weighted value. The decimal number is calculated as the sum of
the weighted values of all bits in the register that are set to 1.
Bits 0 1 2 3 4 5 6 7 ...
Weight 1 2 4 8 16 32 64 128 ...
Example:
The decimal value 40 = 32 + 8 indicates that bits no. 3 and 5 in the status register are
set.
5.4.5 Error queue
Each error state in the instrument leads to an entry in the error queue. The entries of
the error queue are detailed plain text error messages that you can look up in the error
log or query via remote control using SYSTem:ERRor[:NEXT]? or
SYSTem:ERRor:ALL?.
Each call of SYST:ERR? returns the newest error and clears it from the error queue. If
no error messages are stored there anymore, the instrument responds with 0, "No
error".
Application of the status reporting system

General programming recommendationsRemote Control via SCPI
331179.4592.02 ─ 03
6 General programming recommendations
Initial instrument status before changing settings
Manual operation is designed for maximum operating convenience. In contrast, the pri-
ority of remote control is the "predictability" of the instrument status. Thus, when a
command attempts to define incompatible settings, the command is ignored and the
instrument status remains unchanged, i.e. other settings are not automatically adapted.
Therefore, first define an initial instrument status (e.g. using the *RST command) and
then implement the required settings.
Command sequence
As a rule, send commands and queries in separate program messages. Otherwise, the
result of the query can vary depending on which operation is performed first (see also
Chapter 7, "Command sequence and synchronization", on page 34).
Reacting to malfunctions
The service request is the only possibility for the instrument to become active on its
own. Each controller program should instruct the instrument to initiate a service
request if there is an error. The program should react appropriately to the service
request.
Error queues
The error queue should be queried after every service request in the controller pro-
gram. The queue entries describe the cause of an error more precisely than the status
registers. Faulty commands from the controller to the instrument are recorded there as
well. Thus, query the error queue regularly, especially in the test phase of a controller
program (see also Chapter 5.4.5, "Error queue", on page 32).

Command sequence and synchronizationRemote Control via SCPI
341179.4592.02 ─ 03
7 Command sequence and synchronization
IEEE 488.2 defines a distinction between overlapped and sequential commands:
●
A sequential command finishes executing before the next command starts execut-
ing. Commands that are processed quickly are usually implemented as sequential
commands.
●
An overlapped command does not automatically finish executing before the next
command starts executing. Usually, overlapped commands take longer to be pro-
cessed and allow the program to do other tasks while being executed. If overlap-
ped commands have to be executed in a defined order, for example, to avoid
wrong measurement results, they must be executed sequentially. This queueing is
called synchronization between the controller and the instrument.
Setting commands within one command line are not necessarily serviced in the order
in which they have been received, even if they are implemented as sequential com-
mands. To make sure that commands are carried out in a certain order, each command
must be sent in a separate command line.
Example: Commands and queries in one message
If you combine a query with commands that affect the queried value in a single pro-
gram message, the response of the query is not predictable.
The following commands always return the specified result:
:FREQ:STAR 1GHZ; SPAN 100
:FREQ:STAR?
Returned result is always 1000000 (1 GHz).
Whereas the result for the following commands is not specified by SCPI:
:FREQ:STAR 1GHZ;STAR?; SPAN 100
The result could be 1 GHz if the instrument executes commands as they are received.
However, the instrument can defer executing the individual commands until a program
message terminator is received. Thus, the result could also be the value of STARt
before the command was sent.
As a rule, send commands and queries in different program messages.

Command sequence and synchronizationRemote Control via SCPI
351179.4592.02 ─ 03
Example: Overlapped command with *OPC
Suppose an instrument implements INITiate as an overlapped command to initiate a
sweep. Assuming that INITiate takes longer to execute than *OPC, sending the fol-
lowing commands results in initiating a sweep. When the command has been execu-
ted, the OPC bit in the event status register ESR is set:
INIT;*OPC
Sending the following commands also initiates a sweep:
INIT;*OPC;*CLS
However, the operation is still pending when the instrument executes the clear status
command (*CLS) that sets the "operation complete command idle state" (OCIS). So,
*OPC is effectively skipped and the instrument does not set the OPC bit until it exe-
cutes another *OPC command.
Preventing overlapping execution
To prevent an overlapping execution of commands, one of the commands *OPC,
*OPC? or *WAI can be used. All three commands cause a certain action only to be
carried out after the hardware has been set. The controller can be forced to wait for the
corresponding action to occur.
Table 7-1: Synchronization using *OPC, *OPC? and *WAI
Com-
mand
Action Programming the controller
*OPC
Sets the Operation Complete bit in the Stan-
dard Event Status Register (ESR) after all
previous commands have been executed.
●
Set bit 0 in the standard event status
enable (ESE) register
SeeChapter 5.3.3, "ESR and ESE",
on page 29
●
Set bit 5 in the service request enable
(SRE) register
See Chapter 5.3.1, "STB and SRE",
on page 27
●
Wait for service request (SRQ)
*OPC?
The instrument does not respond to further
commands until 1 is returned, which happens
when all pending operations are completed.
Send *OPC? directly after the command
whose processing must be terminated before
other commands can be executed.
*WAI
The instrument holds the processing of further
commands until all commands sent before the
Wait-to-Continue command (WAI) have been
executed.
Send *WAI directly after the command whose
processing must be terminated before other
commands are executed.
Due to no instrument response, we recom-
mend other methods.
Command synchronization using *WAI or *OPC? is a good choice if the overlapped
command takes only little time to process. The two synchronization commands simply
block overlapping execution of the command. Append the synchronization command to
the overlapped command, for example:
SINGle;*OPC?
For time-consuming overlapped commands, you can allow the controller or the instru-
ment to do other useful work while waiting for command execution. Use one of the fol-
lowing methods:

Command sequence and synchronizationRemote Control via SCPI
361179.4592.02 ─ 03
*OPC with a service request
1. Execute *SRE 32
Sets the Event Status Bit (ESB) of the service request enable register (SRE - bit 5
weighted 32) to 1 to enable ESB service request.
2. Execute *ESE 1
Sets the OPC mask bit of the standard event status register (ESR - bit 0 weighted
1) to 1.
3. Send the overlapped command with *OPC.
Example: INIT;*OPC
4. Wait for an ESB service request.
The service request indicates that the overlapped command has finished.
*OPC? with a service request
1. Execute *SRE 16.
Sets the Message Available bit (MAV) of the SRE (bit 4 weighted 16) to 1 to enable
MAV service request.
2. Send the overlapped command with *OPC?.
Example: INIT;*OPC?
3. Wait for an MAV service request.
The service request indicates that the overlapped command has finished.
*OPC? with serial poll
1. Send the overlapped command with *OPC?.
Example: viWrite("INIT: *OPC?");
2. Use serial poll (viReadSTB(vi, &stb)) and check MAV (bit 4 weighted 16) or
ERR (bit 2 weighted 4).
3. Repeat the serial poll after 50 ms to 1000 ms until the operation is complete. Note
that excessive serial polls can slow down the operation of your instrument.
A MAV bit indicates that the overlapped command has finished successfully, ERR
bit indicates that the overlapped command has failed.
For more programming examples, see Chapter 8.4, "Command synchronization",
on page 38.

Programming examplesRemote Control via SCPI
371179.4592.02 ─ 03
8 Programming examples
The following chapters provide basic programming examples.
The examples contain SCPI commands supported by instruments and the following
symbolic scripting commands:
●
// <comment>:
A <comment> ignored by the used programming tool
●
WHILE <query> <> <value>:
Waits until the <query> returns a certain <value>, e.g. a specific state is reached.
●
WAITKEY <message>:
Displays a dialog box with a <message> and waits until you close the box.
For advanced programming examples, refer to www.github.com/Rohde-Schwarz/
Examples.
● System reset........................................................................................................... 37
● Instrument status byte.............................................................................................37
● Error query.............................................................................................................. 38
● Command synchronization......................................................................................38
8.1 System reset
// *****************************************************************************
// Reset instrument to establish initial instrument status, clear all event
// status registers and queues.
// *****************************************************************************
*RST;*CLS;*OPC?
8.2 Instrument status byte
// *****************************************************************************
// Read the status byte register to query the instrument status.
// Alternatively, not to interfere with output buffer, use VISA function
// viReadSTB.
// *****************************************************************************
*STB?
viReadSTB()
// *****************************************************************************
// Clear status registers, set the service request enable register to disable
// all events, and set the standard event status enable register to disable
// status reporting.
// *****************************************************************************
Instrument status byte

Programming examplesRemote Control via SCPI
381179.4592.02 ─ 03
*CLS;*WAI
*SRE 0
*ESE 0
// *****************************************************************************
// Enable standard questionable event status register (bit 3 weighted 8)and
// standard operation event status register (bit 7 weighted 128) - set SRE to
// 8+128=136.
// *****************************************************************************
*SRE 136
// *****************************************************************************
// Alternatively, set the same value in hexadecimal or binary format.
// *****************************************************************************
*SRE #H88
*SRE #B10001000
8.3 Error query
// *****************************************************************************
// Execute two wrong commands and query the error queue - both
// errors are reported, the error queue is cleared by reading.
// *****************************************************************************
NONSENSE:FOO?
*NONSENSE?
SYSTem:ERRor:ALL?
// *****************************************************************************
// Execute a correct command and query the latest error - the instrument
// reports no error.
// *****************************************************************************
*IDN?
SYSTem:ERRor?
8.4 Command synchronization
// *****************************************************************************
// Use *WAI to synchronize the measurement: instrument holds commands 3, 4
// until commands 1, 2 are finished. Due to no instrument feedback on waiting,
// we recommend other methods.
// *****************************************************************************
command1;command2;*WAI;command3;command4
// *****************************************************************************
// Use *OPC? for synchronization: instrument executes commands 1, 2.
// When finished continues with processing of commands 3, 4.
Command synchronization

Programming examplesRemote Control via SCPI
391179.4592.02 ─ 03
// *****************************************************************************
command1
command2
*OPC?
command3
command4
// *****************************************************************************
// Use *OPC + serial poll for synchronization: instrument processes command 1.
// Enable the OPC bit of the ESE register and read the ESR register
// to clear pending events. The query also ensures that all previous
// commands are processed before the next step.
// Send command 2 with OPC*.
// Poll the status byte register using VISA built-in command viReadSTB().
// When the command 2 is finished, the OPC bit in ESR register also sets the
// event status bit (ESB = bit 5) in the STB register.
// Then the instrument continues with processing of commands 3, 4.
// *****************************************************************************
command1
*ESE 1;*ESR?
command2;*OPC
viReadSTB() until ESB bit is 1
command3
command4
/// *****************************************************************************************
// Use service request for synchronization
// instrument processes command 1.
// Enable ESB (bit 5 in STB register) Enable OPC bit (bit 0 in ESR)
// Clear the ESR register by reading it (the value is not relevant).
// *****************************************************************************************
command1
*SRE 32
*ESE 1
*ESR?
// *****************************************************************************************
// To enable event notification use the following VISA function:
// *****************************************************************************************
viEnableEvent(vi, VI_EVENT_SERVICE_REQ, VI_QUEUE, 0)
// *****************************************************************************************
// If required discard stale events before generating a new SRQ:
// *****************************************************************************************
viDiscardEvents(vi, VI_EVENT_SERVICE_REQ, VI_QUEUE)
viReadSTB() until SRQ (bit 7) is unset
// *****************************************************************************************
// Insert *OPC in the command sequence to generate service request (SRQ)
// *****************************************************************************************
command2;*OPC
Command synchronization

Programming examplesRemote Control via SCPI
401179.4592.02 ─ 03
// *****************************************************************************************
// Wait for the generated SRQ and read the corresponding status byte -> SRQ (bit 7) is set.
// *****************************************************************************************
viWaitOnEvent(vi, VI_EVENT_SERVICE_REQ, timeout, NULL, NULL)
viReadSTB(vi, &stb)
Command synchronization

Contacting customer supportRemote Control via SCPI
411179.4592.02 ─ 03
9 Contacting customer support
Technical support – where and when you need it
For quick, expert help with any Rohde & Schwarz product, contact our customer sup-
port center. A team of highly qualified engineers provides support and works with you
to find a solution to your query on any aspect of the operation, programming or applica-
tions of Rohde & Schwarz products.
Contact information
Contact our customer support center at www.rohde-schwarz.com/support, or follow this
QR code:
Figure 9-1: QR code to the Rohde
&
Schwarz support page

IndexRemote Control via SCPI
421179.4592.02 ─ 03
Index
Symbols
*OPC ................................................................................. 35
*OPC? ............................................................................... 35
*RST .................................................................................. 33
*WAI .................................................................................. 35
9.91E37
Remote control ........................................................... 22
B
Block data ......................................................................... 19
Boolean parameters .......................................................... 18
Brackets ............................................................................ 20
C
Case-sensitivity
SCPI ........................................................................... 15
Colon ................................................................................. 20
Comma .............................................................................. 20
Command sequence
Recommendation ........................................................ 33
Commands ........................................................................ 23
Brackets ...................................................................... 20
Colon .......................................................................... 20
Comma ....................................................................... 20
Command-line structure ............................................. 21
GBIP, addressed ......................................................... 12
GBIP, universal ........................................................... 12
Instrument control ....................................................... 23
Overlapped ................................................................. 34
Pipe ............................................................................. 20
Question mark ............................................................ 20
Quotation mark ........................................................... 20
SCPI compliant ........................................................... 23
Semicolon ................................................................... 20
Sequential ................................................................... 34
Syntax elements ......................................................... 20
White space ................................................................ 20
Common commands
Syntax ......................................................................... 14
CONDition ......................................................................... 26
Customer support .............................................................. 41
D
DCL ................................................................................... 12
DEF ................................................................................... 18
DOWN ............................................................................... 18
Driver ................................................................................. 13
E
ENABle ........................................................................24, 26
Error queues
Recommendations ...................................................... 33
ESB ................................................................................... 27
ESE ................................................................................... 29
ESR ................................................................................... 29
EVENt ............................................................................... 26
G
GET ................................................................................... 12
GPIB
Address ....................................................................... 11
Characteristics ............................................................ 11
Interface messages ..................................................... 11
Remote control interface ............................................... 6
GTL ................................................................................... 12
H
HiSLIP
Protocol ......................................................................... 8
Resource string ............................................................. 7
I
IFC .................................................................................... 12
INF .................................................................................... 18
Instrument messages ........................................................ 23
Instrument-specific commands ......................................... 23
Interface functions
RSIB ............................................................................. 9
Interface messages ........................................................... 10
Interfaces
GPIB ............................................................................11
LAN ............................................................................... 7
USB ............................................................................. 11
Interrupt ............................................................................. 30
Invalid results
Remote control ........................................................... 22
IP address ........................................................................... 7
IST flag ........................................................................ 24, 28
K
Keywords
Mnemonics ................................................................. 14
L
LAN
Interface ........................................................................ 7
IP address ..................................................................... 7
LXI .............................................................................. 10
Remote control interface ............................................... 6
RSIB protocol ................................................................ 9
VXI protocol .................................................................. 8
LLO ................................................................................... 12
LXI ..................................................................................... 10
M
Malfunctions
Reacting ...................................................................... 33
MAX .................................................................................. 18
Messages
Commands ................................................................. 23
Instrument ................................................................... 23
Instrument responses ................................................. 23
MIN ....................................................................................18
Mnemonics ........................................................................ 14
Optional ...................................................................... 16

IndexRemote Control via SCPI
431179.4592.02 ─ 03
N
NAN ................................................................................... 18
NAN (not a number)
Remote control ........................................................... 22
NINF .................................................................................. 18
NTR ................................................................................... 24
NTRansition ...................................................................... 26
Numeric parameters .......................................................... 17
Numeric values
Special ........................................................................ 18
O
Operation complete ........................................................... 29
Overlapped
Commands ................................................................. 34
Overlapped commands
Preventing ................................................................... 35
P
Parameters
Block data ................................................................... 19
Boolean ....................................................................... 18
Numeric values ........................................................... 17
SCPI ........................................................................... 16
Special numeric values ............................................... 18
String .......................................................................... 19
Text ............................................................................. 19
Pipe ................................................................................... 20
PPC ................................................................................... 12
PPE ............................................................................. 24, 28
PPU ................................................................................... 12
Protocol
RSIB ............................................................................. 9
VXI ................................................................................ 8
PTRansition ....................................................................... 26
Q
Queries ........................................................................22, 23
Status .......................................................................... 31
Question mark ............................................................. 20, 22
QUEStionable register
Summary bit ................................................................ 27
Quotation mark .................................................................. 20
R
Recommendations
Remote control programming ..................................... 33
Remote control
GPIB address .............................................................. 11
Interfaces ...................................................................... 6
Protocols ....................................................................... 6
RSIB
Interface functions ........................................................ 9
Protocol ......................................................................... 9
S
SCPI
Parameters ................................................................. 16
Syntax ......................................................................... 14
Version .......................................................................... 6
SCPI status register
Event status register ................................................... 29
IST flag ....................................................................... 28
Parallel poll enable register ........................................ 28
Service request enable register .................................. 27
Status byte .................................................................. 27
Structure ..................................................................... 24
SCPI-compliant commands ............................................... 23
SDC ...................................................................................12
Semicolon ......................................................................... 20
Sequential commands ....................................................... 34
Service request (SRQ) ...................................................... 30
Setting commands ............................................................ 23
SPD ................................................................................... 12
SPE ................................................................................... 12
SRE ............................................................................. 24, 27
SRQ .................................................................................. 24
SRQ (service request) ....................................................... 30
Status
Queries ....................................................................... 31
Status registers
CONDition ................................................................... 26
ENABle ....................................................................... 26
EVENt ......................................................................... 26
Model .......................................................................... 25
NTRansition ................................................................ 26
Parts ........................................................................... 25
PTRansition ................................................................ 26
Status reporting system .................................................... 24
Application .................................................................. 30
STB ............................................................................. 24, 27
String in remote commands .............................................. 19
Suffixes ..............................................................................16
Syntax elements
SCPI ........................................................................... 20
T
Text parameters in remote commands .............................. 19
U
UP ..................................................................................... 18
USB
Interfaces .................................................................... 11
Remote control interface ............................................... 6
V
Vertical bar ........................................................................ 20
VISA .................................................................................... 6
Resource string ............................................................. 7
VXI protocol ......................................................................... 8
W
White space ...................................................................... 20
