
R.
Degner
M.
Kaplan
J.
Manning
R.
Meetin
S.
S.
Pasternack
Peterson
H.
Seifert
THE
LUNAR
HOPPING
TRANSPORTER
(NASA-CR-130010)
THE
LUNAR
HOPPING
TRANSPORTER
Final
Report
(Stanford
Univ.).
48
p
HC
$4.5
0
CSCL
13F
JULY
1971
Final
Report
for
Nationa
I
Aeronautics
and
Space
Administration
Grant
No.
NGR,05-020-258
SUDAAR
No.
428
Nti-tS
RC'NIS
no
SUDAAR
No.
428
THE
LUNAR
HOPPING
TRANSPORTER
by
R.
Degner
M.
Kaplan
J.
Manning
R.
Meetin
S.
Pasternack
S.
Peterson
H.
Seifert
Final
Report
for
NASA
Grant
No.
NGR
05-020-258
Department
of
Aeronautics
and
Astronautics
Stanford
University
Stanford
California
July,
1971

ABSTRACT
This
report
describes research
on
several
aspects
of
lunar
transport
using
the
hopping
mode.
Hopping
exploits
the
weak
lunar
gravity,
permits
fuel
economy because
of
partial
recompression
of
propellant
gas
on
landing,
and
does not
require
a
continuous
smooth surface
for
operation.
Three
questions critical
to
the
design
of
a
lunar
hopping
vehicle
are
addressed
directly
in
this
report:
1)
the
tolerance
of
a
human
pilot
for
repeated accelerations,
2)
means
for
controlling
vehicle
attitude
during
ballistic
flight, and
3)
means
of
propulsion
In
addition,
a
small-scale
terrestrial demonstrator built
to confirm-
feasibility
of
the
proposed operational
mode
is
described,
along
with
results
of
a preliminary
study
of
unmanned
hoppers
for
moon
exploration.
ii

ACKNOWLEDGMENTS
The
financial
support
of
NASA through
Grant
No.
NGR 05-020-258
is
gratefully acknowledged;
the
sustained
interest
and
participation
of
Mr.
William
Larson
and
Mr.
James
Howard
of
NASA
Ames
Research
Center
in
the
study was
an
important
element
in
its
success.
Mr.
John
Jones
and
Mr.
Henry
Adelman,
graduate
students
in
the
Stanford
Department
of
Aeronautics
and
Astronautics,
made
important
contributions
as
partici-
pants
in
the
research.
Dr.
Orval
Ellsworth,
physiologist
in
private practice,
and
veteri-
narians
Dr.
James
Parcher
of
NASA
and
Dr.
James
Fox
of
the
Stanford
Animal
Care
Facility
provided technical
support
of
numerous
aspects
of
the
animal
test
programs,
including
gross
post-mortem
examinations
of
animals
and
review
of
results
thereof.
At
the
Stanford
Medical
School,
Dr.
Klaus
Lewin
and
Dr.
Malcolm Mitchinson
performed
histopathological
examinations
of
animal
organs,
Dr.
Donald Nagel
and
Dr.
Gerald
Levine
detailed
examinations
of
animal vertebral
columns,
while
Dr.
Paul
Wolf
provided advice
in
the
hematological
investigations.
The
major
contri-
butions
of
all
these
men
to
the
study
of
primate
response
to
cyclic
acceleration
(Section
2) is
acknowledged
with
thanks.
iii

Table
of
Contents
Page
Abstract
ii
Acknowledgements
iii
Table
of
Contents
iv
List
of
Figures
v
List
of
Tables
vi
1.
Introduction
1
2.
Effects
of
Cyclic
Acceleration
Pulses
on
Primates
4
3.
Attitude
Control
of
Hopping
Vehicles
15
4.
Propulsion
and
Ballistics
21
5.
Terrestrial Prototype
28
6.
Automated
Hopping
Devices
for
Lunar
Exploration
35
iv

List
of
Figures
Fig.
No.
Title
Page
1
Parametric
Design
Curves
for
13
Parabolic
Acceleration
Pulse
2
Schematic
Twin-Gyro
Controller
16
3
Single
Rotational
Degree
of
Freedom
19
Hardware Simulator
4
Experimental
and
Computer
Results
20
for
Hardware Simulator
5
Schematic
of
Propulsion
Components
22
6
Variation
of
Gas
State
Variables
and
26
Mass
during Repeated
Hops
7
Multiple
Exposure
of
Hopper
Flight
Simulation
27
Displayed
on
Cathode
Ray
Screen
8
Technology
Demonstrator
29
9
Systems
Schematic
for
Technology Demonstrator
30
10
Terrestrial
Demonstrator
in
Flight
34
11
Remote Sequencing
and
Functions
37
12
Candidate
Unmanned
Hopper
Configuration
39
v

List
of
Tables
Title
Experimental
Ride
Summary
Experimental
Variables
and
Test
Results
vi
Table
No.
1.
2.
Page
6
9

Section
1
INTRODUCTION
To
date,
vehicles
developed
for
transport
on
the
lunar
surface
have
been
wheeled,
tracked,
or
rocket
propelled.
This
study
examines
several aspects
of lunar
transport using
the
hopping
mode.
Hopping
is
attractive because
it
exploits
the
weak
lunar
gravity.
For
example,
launching
at 450
with
a
velocity
of
15
ft./sec permits
a
horizontal
leap of
50
feet
in
4
sec,
and
launching
at 45
ft./sec
permits
a
leap
of
450
ft.
in
15
seconds. Use
of
a
pneumatic piston
propulsion
system
allows
substantial
fuel
economy,
since
the
propellant
gas
can
be
partly
recompressed
upon
landing.
In
addition,
hopping
does
not
require
a
continuous smooth surface
between
termini,
but
can surmount intervening
obstacles
and
crevasses
as
well
as
permit
vertical
reconnaisance
hops.
Among
the
important
questions
which
arise
when
one
essays
to
design
a
hopping vehicle
are
(a)
the
tolerance
of
a
human
pilot
for
repeated
accelerations,
(b)
means
for
controlling
vehicle attitude during
bal-
listic flight, and
(c)
means
of
propulsion.
Two questions
which
are
omitted
from
this
report
are
the
foot-soil
interaction during
accelera-
tion,
and
acquisition
of
target
point
coordinates.
Although
the
original
hopper
or
lunar
"Pogo"
concept
[1]*
envisaged
take-off
at
1
earth
g
along
a
30-ft. pole,
later
desire
to
have
a
vehicle
small
enough
to
be
carried
on
Apollo
resulted
in
the
arbitrary decision
to
study
a
small
hopper
which
accelerated
at
an average value
of
3
earth
g's
through
a
2-foot
displacement
only,
permitting 50-foot
hops.
Subsequent
work
on
the
acceleration
tolerance
of
primates
indicates
that
this
displacement
should
probably
be
increased
by
a
factor
of
two
or
three,
with
corres-
ponding
reduction
in
peak
acceleration,
to
provide
a
satisfactory
ride
for
humans.
Numbers
in
brackets
indicate
references
listed
at
the
end of this
report.
1

The
model chosen
for
attitude
control
during
flight
utilized
three
sets of
twin gyros
which
during
flight
could
exchange
angular
momentum
with
the
vehicle
around any
of
three
orthogonal
axes.
Two
operational
modes
were
considered:
(a)
pilot
and
vehicle
at
fixed
horizontal
attitude
with
propulsion
leg
rotation
90
°
during
flight
from
launch
to
landing
orientation,
and
(b)
propulsion
leg
fixed to
the
vehicle,
with
entire
ensemble,
including
pilot,
rotating during
flight
to
the
landing
orientation.
The
latter
option
was
chosen
for
analysis
and
simulation
since
it
was
mechanically
less
complex
and
resulted
in
the
pilot's
acceleration
forces
remaining
fixed
in
his
body
axes.
The
propulsion
system model
comprised
a
piston
and
cylinder
attached
to
a "foot"
broad
enough
to
stabilize
angular
motion
around
an
"ankle"
while
the
vehicle
rested
on
the
lunar
surface.
Specified
range was achieved
by
careful
adjustment
of
initial
pressure
in
the
cylinder.
The
energy
losses
resulting
from
impact
of
the
foot
upon
landing
were
made
up
by adjustment
of
the
mass
of
gas
in
the
cylinder.
To
confirm
the
hopping
concept, a
small-scale terrestrial demon-
strator
was
built
which
used
2000
psia cold
nitrogen
as
propellant
and
was stabilized
passively
about
a
vertical
axis
by
a
single
gyro-
scope.
For simplicity,
pneumatic
shock absorbers
were
used
for
landing
rather
than
re-orientation
of
the
propulsion
leg.
This
vehicle
was
able
to
perform
about
20
ten-foot
hops
per
filling
of
its
N
2
bottles. These
were
equivalent
to60-foot
lunar
hops.
In
view
of
the
limited
Apollo
program,
preliminary
study
has
been
given
to the
possibilities
of
unmanned hoppers
on
the
moon.
Because
of
the
absence
of
a pilot, such
vehicles
could
use
much greater accel-
eration
and
be
correspondingly
compact.
They
would, however, require
much
more
sophisticated
guidance
systems, and
if
controlled
by
earth-
based
operators,
be
subject
to
the
1.5
second
one-way
time
delay
in
execution
of
commands. A
possible
operational
plan
for
such
an
unmanned
device
is
discussed
in
the
final
section.
All
of the
work
described
in
this
report
was
carried
out
in
ful-
fillment
of
degree
requirements by
graduate
students
at
Stanford
2

University with
the
support
of
NASA;
previous
reports
include
[2
through
6].
Of
the
work
reported
here,
the
of
acceleration
on
primates was done
by
R.
Degner,
the
system
by
S.
Pasternack,
the
propulsion
analysis
by
R.
restrial demonstrator
by
S.
Peterson, and
the
unmanned
M.
Kaplan.
General
supervision
of
the
work
was
shared
and
J.
Manning.
on
this
work
study
of
effects
attitude control
Meetin,
the
ter-
system
by
by
H.
Seifert
3

Section
2
EFFECTS
OF
CYCLIC
ACCELERATION
PULSES
ON
PRIMATES
Introduction
The
major consideration
for
selecting
an
acceleration
profile
for
a
manned vehicle must
be
"Can
the
pilot
take
it?"
Although
earlier ballistics
and
propulsion
analyses
had
been
carried
out
[3]
assuming
take-off
and
landing
acceleration
pulses
of
5 g
maximum
(3
g
average)
and
0.2
seconds duration,
it
had
not
been
established
that
a
human
could
withstand
very
many
cycles
of
this
acceleration
profile.
There
have
been
no
previous
studies
of
the
effects on
humans
of
cyclic
acceleration
pulses
of
the
type
encountered
in
hopping
vehicle
operation
or of
the
basic
way
in
which
the
design
of
a
hopping
vehicle
is
affected
by
its
acceleration
profile.
An
investigation
of
these
matters
was
therefore
undertaken;
this
study
proved
so
challenging
and
its
results
so
significant
that
it
became
the
principal
focus of
dissertation
research
[7].
This
study
has involved
the
following
three
areas:
design
and
construction
of
a
cyclic
acceleration
facility,
an
experimental
investigation
of
cyclic
acceleration
tolerance,
and
an
analytical
study
based on
a
mathematical
model.
Cyclic
Acceleration Facility
No
acceleration
test
facility
was
available
which
could
be
programmed
to
produce
cyclic
acceleration
pulses,
so
a
facility
was
designed
and
constructed. There
were
not
sufficient
funds
available
to
build
a
general-
purpose
facility
with
active
control
of
the
pulse
shape.
Instead,
a
special-purpose
facility
capable
of
generating
cyclic
acceleration
pulses
of
0.2
seconds
in
width
and
up
to
5 g
in
magnitude
with
passive
control
of
the
pulse
shape
was
designed
and
constructed.
The
basic
principle
of
the
design
is
to
reel
a
guided
impact
assembly
upward
with
a
drive
train
to
some
height,
disengage
the
cable takeup
spool
from
the
rest
of the
drive train
which
allows
the
impact
assembly
to
4

accelerate
downward
under
the
influence
of
gravity,
and
stop
the
impact
assembly
with
a
hydraulic-pneumatic
shock absorbing
system
mounted
onboard.
Three
standard
drop heights
of
32,
50
and
68
inches
were
used
during
operation
of
the
facility.
Friction
and
drag limit
the
free-fall
accel-
eration
to
about
0.8
g
which
results
in
impact
velocities
of
approximately
10.8,
13.9,
and
16.5
ft/sec,
respectively
for
the
three
drop
heights.
Maximum
accelerations
are
2.6, 3.8,
and
5.0
g
with
a
pulse
width
of
about
0.2
seconds
in
all
cases.
A
three
speed
transmission
in
the
drive train
gives
three
cable
takeup
speeds. The three
cable
takeup speeds
coupled
with
three
drop
heights
result
in
nine
standard
rides
used
in
the
experimental
tests.
The
rides
are
summarized
in
Table
1.
Experimental
Investigation
The
original
plan
for
this
study
was
similar
to
that
used
in
previous
studies
of
human
tolerance
to
acceleration
inputs,
i.e.,
to
start
with
low
acceleration
intensities
and
short
exposure
times
and
then
to
increase
both
up
to
the
limit
of
human
tolerance
based
on
subjective
reaction.
A test
protocol
which
included
the
plan
to
use
human
subjects
was submitted
to
the
Stanford
University
Committee
on
the
Use
of
Human
Subjects
in
Re-
search.
However,
this
Committee
recommended
preliminary
animal
tests
since
this
type
of
acceleration
input
had never
been
previously
used
with
either
animal
or
human
test subjects.
Monkeys
were
selected
for
this
study because
of
their
anatomic
and
dynamic
similarity
to
humans.
These
animals
are
dynamically
similar
to
humans
in
that
[8]:
1)
the
major resonance
of
both
is
centered
in the
abdominal
and
thoracic
viscera
2)
the
major resonance
occurs
at
approximately
5
Hz
in
both
primates
3)
the
major resonance
is
damped
approximately
equally
in
both.
The
test
animals ranged
in
weight
from
12
to 20
pounds.
A
harness
was
used
to
restrain
the
animals
in
a seated
position
but
was
not
so
tight
as
to
appreciably
affect
their
dynamic
response.
The
only padding
used
was
1/4
inch
felt
on
the
seat
so
that
the
accelerations measured
on
5

the
impact
assembly
were
very
nearly
the
same
as
those
input
to
the
seat
of
the
animal.
The
animals
were
exposed
to
rides
in
order
of
ascending
number
(see
Table
1).
Each
ride
was continued
for
1
hour,
then
a
rest period
of
several
hours
was used
before
the
next
ride
was
input
to
the
animal.
No
more
than
two
hours
of
exposure was
given
to
any
one
animal
on
one
day.
In
most
cases,
the
animals
were
subjected
to
rides
on
successive
days.
All
of
the
animals
were
x-rayed before
their
first
exposure
and
after
their
last
to
check
for
dislocated
or
fractured
bones.
In
nearly
all
of the
tests,
the
animals
were
sacrified
12
to
24
hours
following
their most
intensive
acceleration
exposure.
An
autopsy
was
performed
on each
animal
and
all.of
the
organs
sent
to
a
pathologist
for
micro-
scopic
examination.
The
spine
is
the
most
heavily
loaded
part
of
the
skeleton,
so
it
was
excised
in
several animals
and
sent
to
an
ortho-
pedic
surgeon
for
detailed
examination.
Ride
No.
Impact
Vel.
Max.
Accel.
Cycles/Hour
1
10.8
ft/sec
2.6
g
380
2
10.8
ft/sec
2.6
g
640
3
10.8
ft/sec
2.6
g
820
4
13.9
ft/sec 3.8 g
290
5
13.9
ft/sec
3.8
g
490
6
13.9
ft/sec 3.8 g
640
7
16.5
ft/sec 5.0
g 230
8
16.5
ft/sec
5.0
g
400
9
16.5
ft/sec
5.0
g
510
Table
1.
Experimental
Ride
Summary
6

Table
2
summarizes
the
test
variables
and
results
of
the
experi-
mental
study.
Some
negative
results
were
obtained
with
the
first
three
animals
tested
so
the
study
was
extendedi
Lo
include
four
additional
animals.
Monkey
X-4
was used
for
both
tests
I
and
VIII.
The
first
two
tests
yielded
little
data
since
both
animals
were
held
for
long
post-test
recovery
periods.
In
the
remaining
test,
however,
all
of
the
animals
were
sacrificed
12
to
24
hours
post-test.
For
all
six
of
these
tests,
there
was
no
evidence
of
pathology
during
the
pre-autopsy
observation
period.
There
was
some
soft
tissue
damage
in
a couple
of
the
tests
(III
and
VII)
but
this
was
of
a
minimal
to
moderate
degree
and
cer-
tainly
not
life-threatening.
The
pathologists
concluded
that
the
most
serious
hazard
to
the
animals
undergoing
exposure
to
the
accelerations
was
fat
embolism.
None
of
the
three
animals
exposed
to
only
the
first
six
rides
(Tests
V,
VI,
and
VIII)
contracted
this
disorder.
However,
all
three
of
the
animals
exposed
to
total
exposures
of
greater
than
eight
hours
(Tests
III,
IV,
and
VII)
had
varying
degrees
of
fat
embolism.
No
attempt
will
be
made
to
cover
all
of the
various
aspects
of
fat
embolism
in
this
discussion.
For
a
more
thorough
discussion
than
that
given
here,
the
reader
is
referred
to
a
recent
paper
by
Levy[9]
which
deals
in
some
detail
with
the
pathogenesis,
diagnosis,
treatment,
and
prognosis
of
fat
embolism.
Embolism
indicates
the
sudden
blocking
of
an
artery
or
vein
(or
capillary)
by
a
clot
or
obstruction,
which
has
been
brought
to
its
place
by
the
blood
current.
Fat
embolism
is
a
disorder
wherein
fat
droplets
of
size
sufficient
to
occlude
or
block
the
small
blood
vessels
of
the
various
organs
in
the
body
appear
in
the
circulating
blood.
It
is
a
frequent
and
often
serious
complication
in
individuals
who
have
been
injured.
Although
fractured
bones
are
the
commonest
clinical
association
of
fatal
fat
embolism
in
man,
there
is
ample
evidence
that
concussion
of
bones
without
fracture,
and
soft
tissue
injury,
can
lead
to
fat
embolism.
The
exact
mechanism
behind
the
formation
of
fat
e;mboil
is
not
known.
However,
the
mechanical
theory
is
the
most
widely
accepted.
Accoclrding
to
the
mechanical
theory,
injury
to
tissues
containing
fat
cells, such
7

as
bones
and soft tissues,
ruptures
the
cells,
releasing
the
fat
in
droplet
form.
At
the
same
time,
the
capillaries
and
small
veins
draining
the
injured
tissue
are
disrupted,
resulting
in the
entry
of
the
fat
droplets
into
the
vascular
channels.
Fat
embolism
kills
because
it
impairs
the
function
of
many
organs
in the
body,
particularly
the
lung and
brain,
by
interrupting
their
blood
supply.
It
is
potentially
a
very
serious
disorder
in
that:
1)
minimal
trauma can cause
the
formation
of fat
emboli
2)
definitive diagnosis
by
clinical
tests
is
very
difficult
3)
an
asymptomatic
period
varying
from
minutes
to
hours
following
injury
makes
tentative
diagnosis difficult
4) in the
seriously
ill
patient
with
fat
embolism,
the
mortality
rate
is
near
100%
without
therapy.
The
finding
that
fat
embolism
was
the
main
hazard
to the
animals
undergoing
this
experiment
is
remarkable
in
that no
studies
on
accelera-
tion tolerance
were
found
in the
literature
in
which
fat
embolism
was
listed
as
a
primary
or
even
secondary
hazard.
This
is
somewhat more
re-
markable
when
one
considers
that,
even
though
fat
embolism
is
always
secondary
to
injury
or
certain
other
diseases, an
Austrian
study
[91
of
263,861
injury
cases
in
which
5,265
of
the
patients
died found
fat
embolism
to
be
the
primary
or
a
contributing
cause
of
death
in
16%
of
the
cases.
More
animal
experiments
would
have
been very
desirable
to
further
establish
what
combinations
of
exposure
time
and
acceleration
levels
produce
fat
embolism.
However,
the
large
amount
of time
and
support
needed
to
conduct
an
extensive
experimental
program
of
this
nature
was
not available.
Analytical
Study
The
objective
of
the
experimental
study
was
to
determine
whether
humans
could
tolerate
cyclic
acceleration
pulses
of
approximately
0.2
seconds
in
duration
and
5
g's
in
magnitude.
However,
the
preliminary
animal
experiments
indicated
the
potential
danger
of
subjecting
human
subjects
to
these
types
of
accelerations.
8

asmwua
poogl
P)
04
(D
. J
0
quau
Tlo-(I
o
{ I
enssT;
:4oS
c
suoT0Zoo0s(Ia
o 00
I
saa:vnjoa Xu-X
g:
zsul
SusTna
ssaalsFC
4,
4Ci
4X
1
I
0o
C)
C-
I
C)
a)
i
I
I
{a,~~~~~
I W I I
I I .
0
0
bo
Ib
0
O 0
= I
l a a
1 0
Ia
bo
C)
o
04
C-
00
0
0
r r.
XTIrreS~a
M M
MO
M M QCt )
IC)
.)
,sal
so-a
- ,
. . .t
r.
,,
~S~-~O~~~~~~~~~~~~~~~~~~~
1 0
O0
C)
0
{U
1
bo
C)
bo0
C
o 4J
o oO
I 0 r3
.
,C
0
o
0:
:
,)
O o
0
W
d C
.)
00
P
CO
o
O r 4 , 4
00
(U)
a)
00
00
CO
OCO>
0 m
4-4
4
-
oU)
,)
.,
g X
m~e
cN
--4
Ca
EH
9
V)
H
E-4
I )
I E
U)
.,
J0
dU
Ia
0
I
*t
hCl
I >
U)0
04
.d
to
I%
o
0 0
IC)
4
C)U)
$40
N 3
UCO)
C)
O)
U)
U)
U)
. Aahovag
:r
U;cI
n · ·
u,
o
a.T.-~ s , o
G~sv,
isal
.
'-, ,--
sXea(
: 8
as 'o*
t
0o
_ o o
to
0
o r o
O O O O 0
00
00
0 cO
Iao ~
~ ~ C
0
C>
..
I 0
oN
o I o cO
cs
oo
cr.
s:
h
.
iI
I
C )
h
IX
::
rs > .
c.
o
o
oo
oC)
C)
c
UOJqPUOD
u > .-
.,
>
£Ew
rd
.,
l 0 0 0
__
_ !o I
.I I
I . ,
1--
, 1 1 _
"i
C
, ,
(',
cn
C % u
CO
6 S H
{H
| H
| D I
i( , ' ~ I .I
'L
I
!>
>
i
I
e

Since
the
acceleration
profile
plays
such
a
basic
role
in
the
design
of
a
manned
hopping
vehicle,
an
analytical
investigation
of
human
tolerance
to
various
acceleration
inputs
was
initiated.
This
study
was based
on
the
use of
a
mathematical
model
to
describe
human
dynamics
and
had
two
phases:
1)
use
the
acceleration
curves
from
the
experimental
study
and
input
them
to
the
model
to
predict
human
tolerance,
and
2)
using
functional
acceleration
inputs,
study
the
effects
of
different
pulse
widths
and
cyclic frequencies
on
human
tolerance.
The
mathematical
model
used
in
this
study
was
developed
by
a
group
[10]
at
the
U.S.
Army
Tank-Automotive
Command
using experimental
transfer
function
techniques.
They
found that
a
human
could
be
modeled
as
a
quasi-linear
spring-mass-damper
system
for
inputs
below
the
limit
of
human
tolerance.
In
the
frequency
domain,
the
acceleration
input
to
a
human
can
be
represented
by
its
power
spectral
density
or
in the
case
of
a
periodic
function,
by
its
Fourier
series.
However,
a
description
ofi
the
acceleration
inputs
fails
to
identify
human
response
to
the
input.
The
Army
group,
based
on
experimental
tests
with
both
sinusoidal
and
random
inputs,
found
that
subjective
discomfort correlates
directly
to
the
average
amount
of
power absorbed
internally.
Their
expression
for
the
average absorbed
power
P
in the
frequency
domain
is:
av
N
2
P =
K
A
rms
av
il
it
i
where
Kit
=
frequency
dependent parameter
which
describes
dynamics
of
a
seated
human
2
Airms
=
mean
squared
acceleration
components
at
frequency
fi
Ambient
parameters
such
as
vision,
audition,
motivation,
and
mental
set
or
expectancy can drastically
influence a
subject's
response
to
his
vibration
environment. For
these
reasons,
it
is
difficult
to
even
suggest
a
desirable
limit
of
average
absorbed
power.
However,
the
Army
group
found
that
a
10
watt
ride
was
voluntarily
endured
for
approximately
only
one
minute.
Therefore,
it
seems
that
if
a ride
is
to
be
tolerated
for
more
than
a
few
minutes,
it
must
be
sufficiently
smooth
such
that
Pav
is
well
below
10
watts.
10

For
the
analytical
study,
all
of the
calculations
necessary
to
obtain
P
from
the
acceleration
input
were
performed
on
a
digital
av
computer.
The
experimental
acceleration
rides
were
taped
on
an
analog
tape
recorder,
the
data
A-D
converted,
and
the
samples
stored
on
digital
tape.
The
Fourier
coefficients
were
obtained
using
a
library
subroutine
and
the
mean
squared
acceleration
at
a
given
frequency
computed
from
the
coefficients
at
that
frequency.
The
nine
experimental
rides
gave
values
of
P
ranging
from
av
approximately
6
to
21
watts
in
a
fairly even
fashion.
These
results
indicate
that a
human
would
not
tolerate
any
of
the
experimental
rides
for
more
than
a
few
minutes.
With
respect
to
the
experimental
rides,
it
was
also
noted
that
even
though
the
major
forcing
components
were
below
2
Hz
in
all cases,
those
frequency
components
which
contributed
most
to
P
were
at
av
approximately
4
Hz.
In other
words,
if
the
experimental
rides
were
inputted
to
a
human,
most
of the
absorbed
power
would
be
dissipated
in
the
thoracic
and
abdominal
viscera.
Since
monkeys
are
dynamically
similar
to
humans,
the
fat
embolism
in
the
animals was
likely
caused
by repeated
damped
oscillations
of
the
thoracic
and
abdominal
viscera
which
were
forced
by
the
acceleration
input
pulses.
The
second phase
of
the
analytical
study
was
carried
out
using
functional
acceleration
inputs
to
see
if
any
pulse
was
better
than
that
used
in
the
experimental
investigation.
In
order
to
maximize
the
utility
of
this
investigation
as
regards
the
design
of
a
hopping
vehicle,
the
periodicity
of
the
acceleration
pulses
was
made
to
coincide
with
a
simplified
dynamic
model
of
a
hopping
vehicle
in
a lunar
environment.
The
vehicle
was
modeled
as
a
point
mass
launched
and
landed
at
450
with
respect
to
level
terrain.
All
losses
were neglected
so
that
the
model
ballistic
flight
was
parabolic
in
shape and
the
landing was
a
mirror
image
of
the
takeoff.
A
parabolic
shape
was
used
for
the
landing
and
takeoff
acceleration
pulses.
Three
independent
variables,
acceleration
pulse
width
tpw,
height
gmax'
and
the
time
interval
between
landing
and
the
subsequent
takeoff
t
t serve
as
inputs
to
the
dynamic vehicle
model.
All
of
the
rest'
11

remaining
parameters
which
characterize
flight
are
dependent
variables
and
can
be
calculated
from
these three
inputs.
The
most
important
dependent
variables
from
a
design
standpoint
are the
stroke
required
for
takeoff
dto,
the
horizontal
distance
covered
in
one
hop
dhop'
the
total
time
per
cycle
tcycle,
and
the
average
ground
speed
vav
(equals
dhop/tcycle
).
In
addition,
P
was
calculated
for
each
acceleration
profile
by
inputting
the
waveform
into
the
dynamic
human
model.
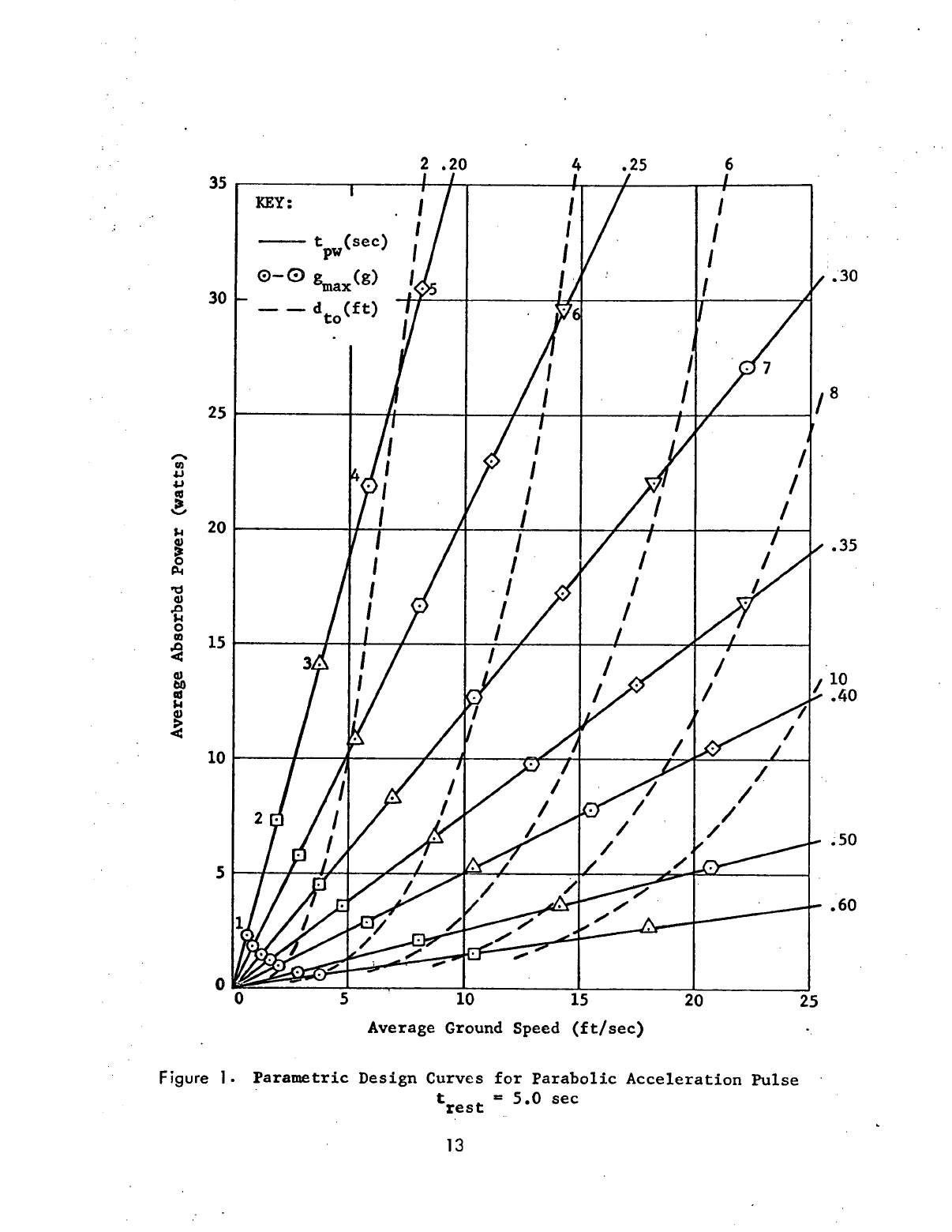
Fig.
1
gives
parametric
design
curves
for
use in
hopping
vehicle
design.
Even
though
they
are
dependent
parameters,
the
average
ground
speed
v
and
average
absorbed power
P
are
the
most
important
variables
av
av
so
they
were
used
for
the
major
axes.
One
independent
variable
trest
was
held
constant
at
5 seconds.
Computer
runs
were
made
with
t
held
pw
constant
and
gmax
incremented
in
steps
of
1
g.
The
takeoff
stroke dto
is
also
a
very
important
parameter
from
a
design
standpoint
so
lines
of
constant
stroke
distance
were
mapped on
the
original
curves.
From
an
inspection
of
the
parametric
design
curves,
a
number
of.
interesting
observations
are
immediately
apparent.
For
instance,
assume
that
8
ft/sec
is
the
minimum
average
ground
speed
that
would
prove
useful
for
a
lunar
hopping
vehicle.
This
speed
can
be
accomplished
by using
a
parabolic
pulse
with
tpw
=
0.2
sec
and
gmax
=
5g.
However,
this
results
in
an
average
absorbed power
of
over
30
watts,
well
above
the
10
watt
maximum
which
can
be
tolerated
for
any length
of
time.
The
same
average
ground
speed
can
be
effected
by
using
a
pulse
with
tp
=
0.5 sec
and
g = 2
g.
This pulse
gives
an
acceleration
profile
for
which
P
is
approximately
2
watts!
The
penalty
for
going
from
av
the
former
ride
to
the
latter
is
an
increase
in
the
takeoff
stroke
dt
from
approximately
2
feet
to
approximately
6
feet.
The
explanation
for
marked decreases
in
P
and
hence
subjective
av
discomfort
for
the
same
average ground
speed
with wider
pulse
widths
can
be
summarized
as
follows.
Pulse
widths
of
approximately
0.2
seconds
give
acceleration
profiles
with
significant
components
in
the
region
of
5
Hz,
which
are
particularly
intolerable
in
that
they
excite
the
major
visceral
resonance.
In
general,
the
wider
the
pulse width,
the
lower
the
frequency
components
of
the
associated
ride,
which
produces
less
subjective
discomfort
for
the
same
average
ground
speed.
12
35
.30
30
d t)
,o
__dto
I 1
/8~~
25
$20 5_10_15320I5
1
I I
4)0
1
bo
4
15r-/
/ I /
10
.50
.60
~0
Average Ground
Speed
(ft/sec)
Figure
1.
Parametric
Design
Curves
for
Parabolic
Acceleration
Pulse
trest
5.0
sec
rest~~'
~
Conclusions
and
Recommendations
Fat
embolism
was found
to
be the
main
hazard
to
animals exposed
to
cyclic
acceleration
pulses.
However,
fat
embolism
is
most
commonly
clinically
associated
with
injuries
resulting
from
single
impacts.
This
suggests
that
fat
embolism
is
at
least
a
secondary
hazard
for
a
wide
range
of
acceleration
exposures
and
this
premise
should
be
explored
with
further
animal
studies.
In addition,
the
findings
of
the
experi-
mental
study
raise
serious
questions
regarding
the
common
practice
in
studies
of
human
voluntary
tolerance
of
progressively
increasing
the
acceleration
loading
and/or exposure
time
to
the
point
where
subjects
complain
of
moderate
to
severe
pain.
The
analytical
study indicated
that
a
human
could tolerate
the
ride
of
a
hopping vehicle
at
speeds
of
at
least
8
ft/sec
if
pulse
widths
of
at
least 0.4 sec
were
used.
These results
should be
verified
by
experiments involving
first
monkeys
to
check
for
fat
embolism
and
other
hazards
and
then
continuing
with human
subjects
if
warranted.
14

Section
3
ATTITUDE
CONTROL
OF
HOPPING
VEHICLES
In
this
section,
the
automatic attitude
control
of
hopping
vehicles
is
analyzed
assuming
the
use
of
paired
control
moment
gyros
to
produce
torques
on
the
vehicle.
The
analyses
are
verified
both
by
computer
and
hardware
simulations.
A
more
detailed
discussion
of
the
subject
matter
of this
section
is
given
in
[11].
After
a
hopping
vehicle
leaves
the
surface,
it
must
be
reoriented
so
that
the
propulsion
leg
is
at
the
instant
of
landing
nearly
aligned
with
the
mass
center
velocity
vector.
Upon
landing,
the
vehicle
is
rotated
to
the
vertical
and this
orientation
is
maintained
until
the
initiation
of
the
next
hop.
The
rotations
at
take-off
and
landing
may
be
accomplished
by
precessing control
moment
gyros
in
a
paired
or
twin
configuration
(Fig.
2).
In such
a
configuration,
moments
are
produced
about
a
single
body
axis
much
like
flywheel
attitude
control
systems.
Momentum
storage
devices
such
as
control
moment
gyros
are
attractive
for
use
in
hopping
vehicles because
no
mass
is
expelled
on
each
hop
as
would
be
the
case
for
rocket
reaction
systems.
The
magnitude
of
angular
momentum
which
must
be
stored
in
the
twin
gyro
controller
is
determined
in
part
by
the
flight
time
during
which
the
vehicle
must
be
rotated
from
the
launch
to
landing
orientation.
Minimizing
the
amount
of
this
stored
angular
momentum
is
accomplished
by
allowing
gyro gimbal angles
to
approach
90° ,
at
which
angle
all of
the
stored
angular
momentum
is
transferred
to the
vehicle.
If
large
gimbal
angles
are
to
be
achieved,
the
torque
motor
which
precesses
the
gyros
must
have
a torque
capability
greater
than
0.71934
of
2h
2/I,
where
h
is
the
angular
momentum
of
each
gyro
rotor
and
I
is
the
moment
of
inertia
of the
vehicle
about
its
pitch
axis.
This
relationship
results
from
the
intimate
coupling
of the
gyro
and
vehicle
equations
of
motion.
Unlike
flywheel
attitude control
systems,
all
of
the
stored
angular
momentum
in
a
twin-gyro
controller cannot
be
transferred
to
the
vehicle
with
an
arbitrarily
small
torque
level.
15

CONTROLLER
FRAME
TORQUE
MOTOR
TORQUE
MOTOR
GYRO
WHEEL
MOMENTUM
EXCHANGE
AXIS
mm...
(CONTROL
AXIS)
GYRO
WHEEL
Schematic
Twill.-Gyro
and
Coordinates
16
Figure
2.

To
use
the
stored
angular
momentum
most
efficiently
requires
an
optimum
control
torque strategy.
The
strategy.which minimizes
the
time
required
to
rotate
the
vehicle from
the
launch
to
landing
orientation
is
bang-bang
in
nature,
i.e.,
the
torque
motor
should
always
operate
at
its
maximum
positive
or
negative
value
of
output
torque.
Allowing
a
gimbal
angle
of
90
°
results
in
a
singular
solu-
tion
to
the
optimal equations
for
which
the
control strategy
is
zero
torque.
In
this case,
a
gimbal
angle
of
90
°
is
an
equilibrium
angle
requiring
no
torque
from
the
motor. Clearly, a
gimbal
angle
of
90
°
places
the
vehicle
upon
a
minimizing
singular
arc since
all
of
the
stored
angular
momentum
has
been
transferred
to
the
vehicle.
The
times
during
the
reorientation
maneuver
when
the
torque
switches
sign
or
becomes
zero
are
determined
by solving
a
two-point
boundary
value
problem
for
which
the
equations
are
nonlinear.
The
solution
obtained
is
open
loop,
i.e.,
the
desired
terminal
conditions
will
be
met only
if
the
initial
conditions
are
known
precisely
and
if
the
mathematical
model
adequately
describes
the
system.
A
sub-optimal
control
law
which
is
easily
realizable
may
be
formulated
for
response
to
an
initially
large
error
as
follows:
an
initial
period
of
maximum
torquing
when
error
is
large
is
followed
by
a
period
in
which
torque
is
proportional
to the
state
variables,
which
insures
meeting
the
terminal conditions.
Such
a
control
law
has
been
implemented
in
the
hardware
simulator.
An
actual
hopping
vehicle
with
six
degrees
of
freedom
must
have
three
twin-gyro controllers, each
one
controlling
about
a single
body
axis.
The
roll
and
yaw
controllers must
align
the
vehicle pitch
axis
with
the
normal
to the
plane
formed
by
the
mass
center
velocity
vector
and
the
direction
of
gravity.
As
the
vehicle
rotates
about
the
pitch
axis
to
the
landing
orientation,
the
roll
and
yaw
controllers must
continually
exchange angular
momentum
to
reduce
errors
associated
with
any initial
angular
momentum
contained
in
the
roll-yaw
plane.
The
control
laws
for
the
three
twin-gyro controllers
have
been
veri-
fied
by
digital
simulation.
17

The
analysis
of
a
single
rotational
degree
of
freedom vehicle
has
been
demonstrated
by
means
of
a
hardware
simulation.
The
vehicle,
pictured
in
Fig.
3, is
constrained
to
have
but
one
rotational
degree
of
freedom
by
floating
the
vehicle
on
a thin
cushion
of
gas
above
a
smooth
table.
In
this
way,
the
vehicle
can
translate
in the
plane
of
the
table
with
frictional
forces
and
moments
reduced
to
a
low
level.
By
tilting
the
table,
a
component
of
gravity
is
obtained
within
the
plane
of
the
table
allowing
the
vehicle
to
hop
and
land
by
pushing
against
a
ledge
at
the
lower
edge
of the
table.
The
simulator
vehicle
is
self-contained,
carrying
its
own
gas
supply
for
support,
batteries
for
electrical
power,
and
sensors
and
electronics
for
implementation
of
the
various
control
laws.
The
vehicle
attitude
angle
is
measured
by
a
low
friction potentiometer
coupled
to
a
two-degree-of-freedom
directional
gyro.
The
only
other
directly
measured parameter
is
the
twin-gyro
controller
gimbal
angle.
These
signals
are
processed
in
the
electronics
package
and a
voltage
is
applied
to
the
controller
torque
motor.
The
vehicle
attitude
and
gimbal angle
signals
are
also
brought
to
an
external
strip
recorder by
means
of
a
light,
flexible
umbilical
wire
for
recording.
The
data
from
the
simulator
vehicle
have
been
com-
pared
with
the
digital simulation
and
the
agreement
is
very
good
(see
Fig. 4).
The
analyses
and
simulations have
shown
that
twin-gyro
controllers
are
well
suited
to the
attitude
control
problems
associated
with
hopping
vehicles.
18

Figure 3. Single Rotational Degree of Freedom Hardware Simulator

~!
-ttb
t i
g!0t2 tf0
=
';'
-0-,
t.
T,:!
,;
t
i;
I IX
(r
a d )
TYPICAL
HOP
DATA
-IO~~~~~~~~~~~~~~~~~~~~~,
-. 1.
{
4fi:;,! i':
+~~~
V
(rod)
~~Ig
.
0HH
HH
t!It.'l'.~t~t~ft.
t~l'dfl!!'i'l~ftllt.1tlt;t!i!ft,iii
l'til
ti~i~'ft4
tt~
~.
o
~t~iiiri[,tIt.fflt.Lt[il'll,,:
TYPICAL
HOP
DATA
,I
l
t
Figure 4.
Exper
imenta
l -
and
C
its~~~~~~~tt
!:i'i!',;
lt~l~li'11
H It
II:t
Ml$tltl
ltt~tflttii.
,:
I
,~
~ilj/i
t!i'i
IF
!
[....:.
nr.llh ,. tt
1.0
liri
I
lift4tt1t11f1
fIti
1 ilr
tii
l Nlllll
:Ilillttt
tLi
0
(rad
i~iiiift~inf~l[T~~1.0 i f1~nm
r..~;
"
,~
·:
,
!
DIGITAL
COMPUTER
SIMULATION.
NOTE
GOOD
AGREEMENT
BETWEEN
THE
ACTUAL
HOP
AND
DIGITAL
SIMULATION
DATA.
Figure
4.
Experimental
and
Computed
Results
for
Hardware
Simulator
20
I

Section
4
PROPULSION
AND
BALLISTICS
Introduction
The
propulsion
unit
for
the
lunar
hopper
imparts
a
specified
velocity
to the
vehicle
at
take-off
and,
assisted
by
the
control
system,
decelerates
it
to
zero
velocity
at
landing.
Considered
along
with
the
ballistic
motion
must
be
possible
on-ground
motion
between
hops.
Initial
ballistic
analysis
was done
by
Seifert
and
Kaplan
[1,2,3].
The
work
described
in
this
section
is
presented
in
more
detail
in
[12].
Design
A
gas-piston
system
was
selected
for
primary
propulsion.
Fig.
5
shows
schematically
the
important
propulsion
components
for
a
hopper
using
a
propulsion
leg
fixed
to
the
vehicle.
The
accumulator
provides
high-pressure
gas
to
the
cylinder.
Pressure
adjustments
are
made
by
adding
gas
to
or
venting
gas
from
the
cylinder
to
the
lunar
vacuum.
The
propellant
gas
supply
unit
includes
tanks
and
other
necessary
hard-
ware.
A
leg
brake
controls
(i.e.,
decreases)
the
relative
velocity
between
the
leg
and
main
body.
In
addition,
an ankle
brake
at the
pivot
controls
the
relative
angular
velocity
between
the
foot
and
leg.
In
normal
operation,
the
vehicle
is
initially
on
the
ground
with
the
leg
oriented
vertically.
The
pilot
sets
the
desired
launch
azimuth,
horizontal
range,
and
launch
angle
into
the
system
to
initiate
the
hop.
The
vehicle
rotates
about
the
vertical
to
the
launch
direction
and
then
tilts
to
the
launch
angle.
The
cylinder
pressure
is
adjusted
to
a pre-
dicted
initial
value.
The
gas
in
the
cylinder
expands,
forcing
the
main
body
to
accelerate
up
the
leg.
(The
foot
may
slide
somewhat
along
the
ground.)
The
control
system
monitors
the
main
body
velocity.
When
a
specified
velocity
is
reached,
the
leg
brake
rapidly
"engages"
or
picks
up
the
leg.
21
C

CAkle
Figulre
5.
Schematic
of
propulsion
Components
22

During
the
free flight,
the
vehicle
follows
a
ballistic
parabola.
Free
flight
ends
as
a
part
of
the
foot
touches
down
on
the
ground.
The
foot
then
may
"slap
down"
toward
the
ground.
During
free
flight
or
slapdown
the
cylinder
pressure
may
be
readjusted.
As
the
entire
foot
impacts
the
ground,
the
leg
brake
releases
to
disengage
the
leg
from
the
main
body.
The
main
body
decelerates
down
the
leg,
recompressing
the
gas.
Simultaneously,
the
vehicle
rotates
toward
the
vertical.
The
foot
may again
slide.
When
the
relative
velocity
between
the
main
body
and
leg
reaches
zero,
the
leg
brake
locks.
Shortly
afterwards
the
ankle
brake
locks
as
the
vehicle
reaches
the
vertical
to
end
the
hop.
Propulsion
operation
is
partially
conservative
because
much
of
the
energy
expended
by
the
gas
during
acceleration
is
recovered
at
deceler-
ation.
However,
pressure
adjustments
in
the
cylinder
by
adding
and
venting
gas
must
generally
be
accomplished
to
account
for
energy
losses
(e.g.,
engagement)
and
elevation
changes.
Either
a cold
(non-reacting)
gas
or
a
hot
(reacting)
gas
could
be
used
in
the
propulsion
unit.
Possible
cold
gases
include
air,
He,
H
2
,
NO,
N
2
,
and 02.
A
cold
gas
system
using
N2
was
chosen
for
analysis
of
this
model.
A
likely
candidate
for
a
hot
gas
system
is
hydrazine
(N
2
H4 ),
which
decomposes
catalytically
or
thermally
into
gaseous
ammonia,
nitrogen,
and
hydrogen.
Flight
Analysis
To
estimate
ideal
vehicle
performance,
a
frictionless,
non-sliding
model
of
the
propulsion
and
ballistics
has
been
formulated.
Assuming
isentropic
gas
expansion
and
instantaneous
leg
braking,
the
first-order
equations
of
motion
for
acceleration,
free
flight,
and
deceleration
were
derived.
Using
the
free-flight
equations,
the
optimum
launch
angle
which
maximizes
the
range
is
found
to
be
aopt
=
450
+
a/2,
where
a
is
the
average
surface
slope.
Specializing
to
a
opt'
for
-10
°
< a <
100,
approximate
analytical
solutions
with
a
numerical
error
of
less
than
1%
have
been
found
for
the
initial
and
final
cylinder
pressures
po
and
pf
:
23
=
(y-
1)(M
+
2m)g
tan
a
Po
_
tan
a
2A-1
(do)(7
1)]
do
opt
X
Pf
= ( -
1)
Mg
cot
a
I(df)(Y
1
d
ot
1
pt
where
XR
=
horizontal
displacement
of
vehicle,
M
and
m
are
vehicle
and
leg
mass,
y
is
gas
specific
heat
ratio,
g
the
lunar
gravity,
and
A
the
piston
area.
The
subscripted
d's
indicate
start
and
stop
positions
of
the
piston
for
the
expansion
and
compression
strokes.
Equations
for
the
amount
of
gas
to
be
added
and
vented
have
also
been
derived.
Fig.
6
shows
the
thermodynamic
variations
in
cylinder
pressure,
temperature,
and gas
mass
for
a
typical
level,
uphill,
and
downhill
hopping
sequence,
cyclically
repeated.
The
parameters
for
this
sequence
are:
M =
37
slug
d
=
df
= 1 ft
m
=
3,slug
d
e
= d
d
= 3 ft
T = 530
0
R
y =
y(N
2
) =
1.40
XR
=
50
ft
g = 5.31
ft/sec
2
The
solid
lines
in Fig.
6
show
the
"equilibrium"
thermodynamic
cycle
(for
three
hops)
approached
as the
number
of
hops
in the
sequence
becomes
very
large.
Using
this
sequence,
the
equilibrium
consumption
for
1000
hops
at
50
ft
per
hop
(10
miles)
is
0.8
slug
of
cold
N
2
.
To
this
amount
an
allowance
of
75
to
100%
is
added
to
account
for
non-
optimum
launches,
rougher
terrains,
refillings
if
necessary,
ullage,
and
a
safety
reserve.
The
total
N2
required
for
the
10-mile
trip
is
estimated
to be
1.5
slug.
If
N2H
4
were
used,
0.3
slug
of
fuel
would
be
needed
for
the
same trip.
24

Second-Order Model
To
obtain
a
more
realistic
estimate
of
the
vehicle
performance,
a
second-order
model
of the
propulsion
and
ballistics
was
established.
It
included
realistic
effects
such
as
sliding,
friction
at
the
pivot
and
in
the
piston,
rotation
during
deceleration,
and
non-instantaneous
engagement.
The
effects
of
the
leg
brake,
ankle
brake,
propellant-
feed system,
gyro-control
system, and
foot-control
mechanism
were
considered
and
a
prediction model
for
cylinder pressures
was
used.
The
resulting
nonlinear equations
were
organized
into
a
computer
program
for
numerical
integration.
Solutions
were obtained
for
about
80
different
hop
configurations
within
the
following ranges
of
hop
parameters:
Average
surface
slope:
-20
< a < 20
°
Desired
horizontal
range:
30
ft
<
XR
<
60
ft
Static
coefficient
of
friction:
0.67
< stat <
2.00
Kinetic coefficient
of
friction<:
0.33
<
"kin
<
1.20
Analysis
of
hopper
landings
indicated
that
rather
large
valves
may
be
needed
to
vent
gas
as
fast
as
is
necessary.
Also,
a
small
amount
of
sliding
during
take-off
(i.e.,
3
in to
6
in)
can
have
a
large
effect
on
performance.
To
provide
a
better
picture
of the
proposed
hop
configurations,
a
computer-graphical
display
of
the
second-order
model
doing
a
hop
in
real
time
was
set
up;
results
were recorded
on
motion
picture
film.
Fig.
7
shows
a
multiple
exposure
of
this
display.
25

.
200
.0
0
800
'
600
I-
400
200
0
*006
=
.004
uE
E
,O02
DISTANCE
Figure
6.
Variation
of
Gas
State
Variables
and
Mass
during
Repeated
Hops
26

Figure
7.
Multiple
Exposure
of
Hopper
Flight
Simulation
Displayed
on
Cathode
Ray
Screen
27

Section
5
TERRESTRIAL
PROTOTYPE
In
this
section, a
terrestrial
technology demonstrator
for
the
concept
of
lunar
transportation
is
described.
Establishment
of
pre-
liminary
design
criteria,
design,
fabrication,
and
testing
are
sum-
marized.
The
work
described
in
this
section
is
presented
in
greater
detail
in
[131.
The
demonstrator
is
shown
in
Fig.
8.
A
schematic
of
the
various
systems
of
the
demonstrator
is
shown
in
Fig.
9.
The
propulsion
system
provides
the
thrust required
for
trajectories
ranging
up
to
a 5
ft.
vertical hop
and
a
10
ft.
horizontal
hop.
Maximum
length
horizontal
hops
are
obtained
by
using
a 45
°
launch
angle
and
straight
line
operating
range
of the
vehicle
is
extended by
repeated
horizontal
hops.
Thrust
forces
are
obtained
by
using
compressed
nitrogen
at
600
psia
to
drive
a
piston down
the
30"
long
cylinder
that
is
located
in
the
center
of
the
structure.
The
piston
shaft
is
attached
to
a
cleated
foot
which
presses against
the
ground
to
propel
the
vehicle.
Hop
trajectories
with
vertical,
670,
and
450
launch
angles
are
achieved
by
reorienting
the
thrust cylinder.
A
hop
is
initiated
by
manually
operating
a
momentary
contact
switch
which
activates
an electrical
circuit.
As
the
switch
is
pressed
the
circuit
transmits
a timed
electrical
pulse
to
a three
way
solenoid valve.
The
valve
opens
a port
which
allows
the
high pressure
nitrogen
into
the
thrust
cylinder.
Pressure
on
the
piston
rapidly
increases
forcing
the
foot
against
the
ground
and
accelerating
the
vehicle
up
the
piston
shaft.
When
the
piston
has
traveled
1
ft.
it
passes a
set of
blowout
ports
which
dump
the
pressure
into
the
atmosphere.
The
electrical
circuit
is
preset
to
shut
off
the
nitrogen
at that
time
and
vent
the
upper
portion
of
the
cylinder
to
atmosphere.
Acceleration
ceases
and
the
vehicle
enters
flight.
As
the
piston
passes
the
blowout
ports
it
contacts
a
compression
spring
which
brings
the
relative
velocity between
the
thrust
leg
and
the
vehicle
to
zero
and
then
expands
to
thrust
the
leg
back
28

...
V-
.'i.
C,-
~
~~~~~'
Figure
8.
Technology
Demonstrator
29
'
t.
l .
.. !
!';
;'
I=:·L;
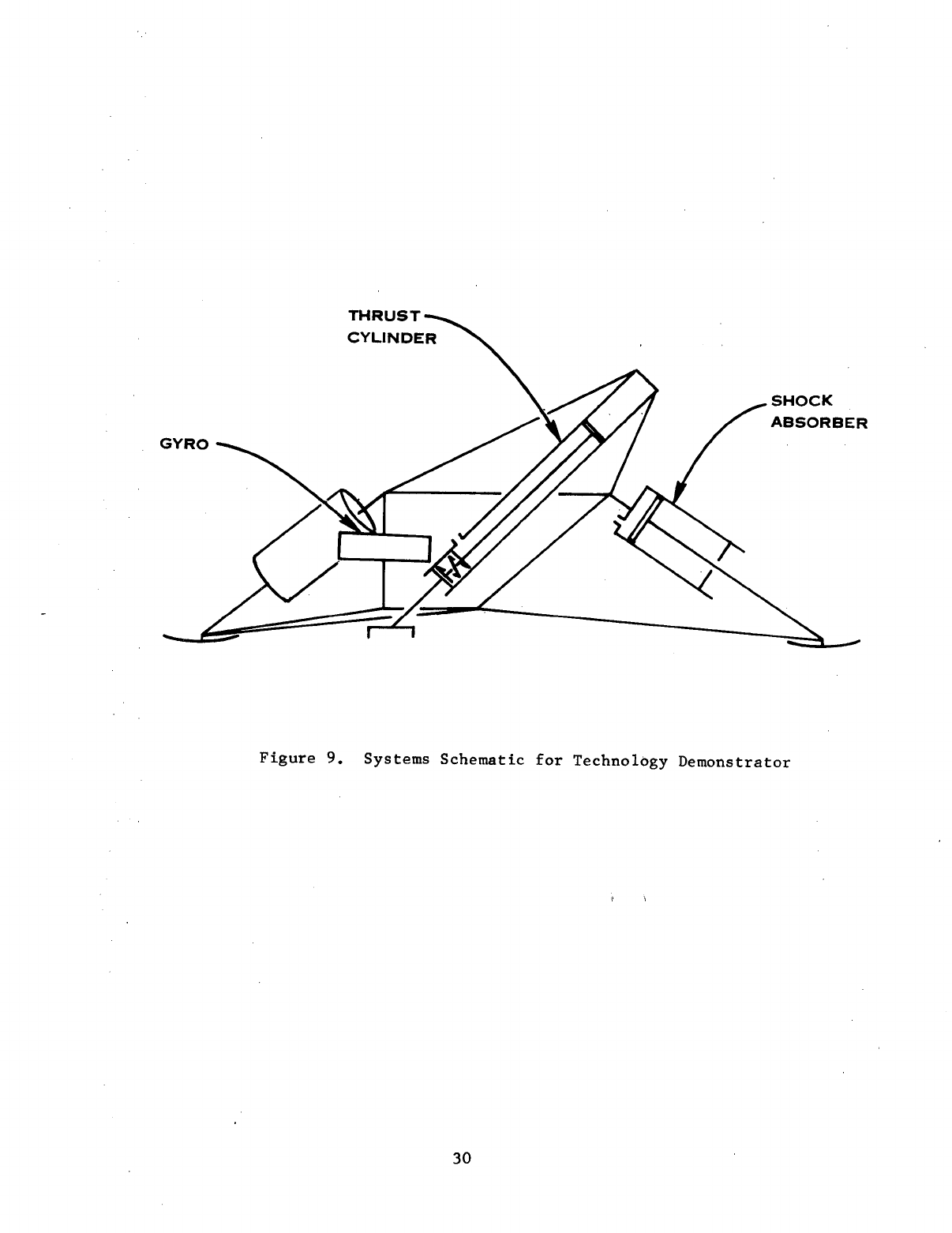
THRUST_
CYLINDER
.SHOCK
ABSORBER
GYRO
Figure
9.
Systems Schematic
for
Technology
Demonstrator
30

towards
the
launch
configuration.
It
is
held
at
the
top
of
the
cylinder
by
a
weak
extension
spring
so
that
it
will
not
be
bent
during
landing.
The
pressure available
to
the
thrust
cylinder
is
regulated
from
2000
down
to
600
psia
which
limits
maximum
acceler-
ation
to
15
g's
to
protect
the
stabilization
gyro
bearings.
This
also provides
the
constant
upstream
pressure
required
for
repeatable
hop
trajectories.
Variable
hop
heights
are
achieved by
adjusting
an
orifice
which
controls
the
gas
flow
rate
into
the
thrust
cylinder
and
by
controlling
the
interval
during
which
gas
is
admitted.
The
cleated
foot
was
designed
to
prevent
slippage
under
the
thrust
required
for
10
ft.
horizontal
hops. A
mathematical
model
was
used
to
determine
component
sizes.
A
vertical
test
rig
was built
and
used
to
obtain
control
settings
for
different
trajectories.
The
gyro mounted
in
the
rear
triangle
of
the
central
structure
is
used
to
provide
the
torque
required
to
cause a limited
angle
of
precession
about
the
vertical
axis
if
impulsive torques
are
applied
during
launch.
Thus
the
vehicle
is
stabilized
to
prevent continuous
pitch
or
roll
which
could
result
in
tumbling
at
touchdown.
A
math-
ematical
model
was
developed
and
used
to
predict
the
relationship
between
thrust offset,
gyro angular
momentum
and
the
resultant
angle
of
precession
or
tilt.
The
gyro,
which
was
recovered
from
a
Norden
bombsight,
can
provide
stabilizing
torques
to
limit
the
tilt
angle
to
150
if
the
thrust
offset
is
held
to
a
maximum
of
.125
in.
during
a
maximum
thrust
5
ft.
vertical
hop.
Although
the
lunar
hopper design
studied
in
this
research
used
the
same
leg
for
both
launching
and
landing,
the
terrestrial
demon-
strator
used
separate
shock
absorbers
for
deceleration.
This
was
done
to
simplify vehicle
attitude
control requirements,
Three
large sym-
metrically
located
pneumatic cylinder
shock absorbers
and
associated
bottom
linkage
and
radiused
feet
make
up
the
landing
gear. The
sym-
metric
configuration
illustrated
can
tolerate
any
angle
of
rotation
about
the
vertical
axis
at
touchdown. The
bottom
leg
of
the
linkage
is
long
enough
to
insure
that
even
if
the
coefficient
of
friction
31

reaches
unity
and
the
vehicle
is
tilted
15
a
at
touchdown
the
landing
force
vector
will
compress
the
fully extended
shock absorber.
The 1
ft.
vertical
stroke
of
the
propulsion system
is
the
same
as
used
in
the
landing gear
and
results
in
a 6
in.
shock
absorber
piston
stroke.
The
kinetic
energy
of
the
vehicle
is
dissipated
by
compressing
atmospheric
air
inside
the
shock
absorber
and
accelerating
it
through
an
orifice
in
the
cylinder
head.
A
mathematical
model
of
that
process
was
developed
[13]
and
used
to
determine
the
minimum
piston
diameter
and
associated orifice
size
required
for
the
5
ft.
maximum
hop
height.
Several
piston
sizes
were
arbitrarily
selected
and
an
optimum
orifice
area
for
each
was
obtained
by
maximizing
the
energy
absorbed
or
mini-
mizing
the
velocity
at
final
impact.
An
apparently
unique
solution
which
would
decelerate
the
demonstrator
to
zero
velocity
at
final
im-
pact
was
obtained
with
a
2.5
in.
diameter
piston
and
a
.125
in.
diameter
orifice.
However,
that
solution
produced
deceleration
forces
in
excess
of
the
15
g's that
the
gyro
could
tolerate.
Therefore,
the
piston
size
was
increased
to
4
in.
which
resulted
in
decelerating
the
demonstrator
to
zero
velocity
earlier
in
the
stroke
and
then
allowing
slow
acceler-
ation
and
final
impact
at
a
low
velocity.
Each
time
vertical
drop
height
is
changed,
the
orifices
are re-
adjusted
to
achieve
minimum
velocity
at
final
impact.
The
shock
ab-
sorbers,
initially
contracted,
must
fully
extend during
launch
to
provide
the
required
energy
absorption
capability.
Although
the
inertial
forces
generated during
launch
were
sufficient
to
overcome
the
friction
forces
which
would prevent shock absorber
extension,
even
a
small
adverse
pressure
differential
working
on
the
piston
area
of
over
12
sq.in.
could
seriously
hinder
the
required motion.
Therefore,
suction
on
the
piston
head
was
immediately
relieved
by
a
specially
designed
large
floating
wafer
check
valve
which
was installed
in
the
cylinder
head.
Shock
absorber
extension
took place
almost
as
quickly
as
ground
clearance
occurred
during
takeoff.
The
design
of
the
central structure
is
controlled by
various
re-
quirements
of
the
propulsion,
stabilization,
and
landing
gear
systems.
32

Minimum
weight,
simplicity
of
fabrication,
and
ease
of
analysis
were
accepted
as
basic
requirements.
The
skewed
triangle
configuration
provides
an
open
central
area
for the
required
mounting
and
adjustment
of
the
thrust cylinder,
symmetric
mount
points
for
the
landing
gear,
and
balanced
mounting
areas
for
the
stabilization
and
propulsion
system
components.
The
upper
members
of
the
structure
were
made
long
enough
to
provide
rough
adjustments
in
the
gas
bottle
locations
for
center
of
gravity
adjustment during
initial
assembly.
Height
of
the
structure
is
governed
by
the
space
required
to
mount
the
gyro
in
the
rear
triangle.
Welding
jigs
were
simplified
by
making
the
gyro
and
air
bottle mount
triangles
vertical.
Thrust
cylinder reorientation
is
achieved
by
installing
different
sets
of
upper
struts
for
each
of
the
three
hop
trajectories.
The length
of the
struts
can
be
changed
to
locate
the
thrust
foot
location
and
provide
for
adjustment
of
the line
of
thrust
application
to
reduce
impulsive
moments
applied
during
launch.
The
asembled
vehicle
is
about
2
ft.
high, 4
ft.
between
landing
gear
feet,
and
weighs
58
lbs.
Fig.
10
illustrates
the
demonstrator
in
flight.
Vertical
hops
of
over
5
ft.
and
horizontal
hops
of
over
11
ft.
have
been
conducted
with
no
stability
or
structural
problems.
Repeated
horizontal
hops can
be
used
to
extend
the
straight
line
operating
range
to
over
150
ft.
33

Figure 10. Terrestrial Demonstrator in Flight
34

Section
6
AUTOMATED
HOPPING
DEVICES
FOR
LUNAR
EXPLORATION
Introduction
Current
planning
for
manned
space
flight
does
not
include
lunar
flights
beyond
Apollo
17.
Surface
mobility
aids
will
be
limited
to
"first
generation"
roving
vehicles,
but
advanced
transporters
will
not
be
developed
until
manned
lunar
flight
becomes
active
again.
To
main-
tain
exploration
activities
a
vigorous
automated
program
will
be
required.
An
essential
tool
in
such
a
program
is
a
remotely controlled
surface
equipment
transporter.
The
USSR already
has
a
roving
device,
Lunokhod
[14]1
and
the
U.S.
has
proposed similar
vehicles
for
many
years
[15].
Exploration
missions
to
both
the
near-
and
far-side
will
be
of
high
priority.
A
relay
satellite
stationed about
the
L
2
Lagrange
point
in
a
halo
orbit can provide
continuous
communications
between
the
lunar
far-side
surface
and
Earth
[16].
Unmanned
missions produce special problems
of
control,
navigation,
and
guidance.
Furthermore,
a
one-way
mission
does
not
permit
sample return.
The
optimum
device
for
automated
surface
mobility
is
one
that
can
use the
lunar
environment
and
peculiar operating
situation
advantageously.
A
hopping
vehicle
has
inherent
qualities
of
speed and fuel
efficiency.
It
can
view
surface
features
with
some
elevation
advantage
while hopping
and
can
stop
at
any desired
site
to
collect
data.
Efficient
use
of
fuel
permits
high
range
capabilities
and
electrical
power
can
be
used
primarily
for
communications
and
instrument
operation. Such
a
device
can make
visual
observations,
transmit
data, and
deploy
instrument selectively.
Basic
operational
aspects
and
possible
configurations
are
discussed
here.
Operational Aspects
Unmanned
surface
devices present
special problems involving
deploy-
ment, control,
and
guidance.
The
first
hop would
be
vertical
for
surveying
the
local
area
and
locating
an initial
landing
site
on
a traverse.
Pro-
pulsion
parameters
are
then adjusted
accordingly
and
a
traveling
hop
is
initiated.
Take-off,
ballistic,
and
landing
are
the
three
phases
of
each
hop.
Television
cameras
can
supply continuous
video
information
to
earth-
based operators.
Two
such
operators
will
be
required
to
perform
guidance
35
!>

and
control
functions
on
a
continuous
basis.
There
is
a
one-way
time
delay
of
up
to
1.5
sec.
due
to
the
extreme distance
between
vehicle
and
operator.
A
further
limiting
factor
is
the
picture
transmission
rate.
However,
it
is
assumed
that
sufficient power
will
be
available
for
a fast
data
rate,
because
propulsion will
not
drain
this
source.
Thus,
the
data
transmission
rate
will
be
assumed sufficient
to
eliminate
further
delays
in
operation.
Transmission
distance
and
rate
do
severely
limit
the
speed
of
automated
rovers.
The
profile
of
a
typical
hop
permits delays
to
have only
a
minor
effect
on
vehicle
performance.
Fig.
11
illustrates
the
sequence
of
events
for
remote
operation.
Operator
1
is
responsible
for
take-off
and
landing
phases
while Operator
2 takes
sightings
and
coordinates
for
future
touch-down
sites.
During
ballistic
phase
the
attitude
is
automatically
maintained.
A
hop
is
initiated
when
the"take-off"
button
is
pushed.
About
1.5
sec.
later
the
thrust
leg
is
released
and
motion
commences.
Operator
1
has no
further duties until
a
landing
decision
must
be
made.
An
abort
command
can
be
given
up
to
1.5
sec.
before
actual surface
contact.
Rockets
are
used
to
perform
abort
maneuvers.
Due
to
transmission
delays, these
rockets
will
be
fired
for
about
3
sec.
more than
necessary
for
safe
landing.
Operator
2
uses
part
of
the
bal-
listic
phase
to
look
for
landing
sites
for
the
following
hop.
He
can
start
this
about
1.5
sec.
after
the
vehicle
reaches suitable
elevation
for
reconnaissance.
When
a
site
is
selected
its
direction
and
distance
are
automatically
recorded
and
propulsion
parameters computed
and sent
up
to
the
hopper
by
the
end
of the
current
hop.
The
ballistic
phase
is
typically
several seconds
long
and
sufficient
for
reconnaissance
and
site
selection.
Each
hop
can
span
50
-
100
feet,
thus
permitting high
average
speeds.
Configuration
Considerations
The
unmanned
terrestrial demonstrator
has
been
built
and
successfully
flown
to
prove
stability
of
attitude control
and
test
performance
capabili-
ties.
Much
of
the
technology developed
is
directly
applicable
to
unmanned
hopping
devices
for
exploration.
Propulsion, stabilization,
and
vehicle
dynamics
are
similar
in
principle
and
design
for
either
manned
or
unmanned
devices.
Significant
differences
occur
in
guidance,
navigation,
and
control,
as
is
the
case
with
lunar rovers.
However,
elimination
of
the
human
factors
36

-.
tElevation
Landing
site
X
in
view
sight
of
landing
point
0
I
]
-
_
Time
Ballistic
Take-off
-'
Landing
Operator
1
delay
View
landing
site
del
Go
Release
Decision
to
la
d
Operator
2
Select
next
site
dela
ecis
on
on
next
top
site
Figure
11.
Remote
Sequencing
and
Functions
37

restrictions
permits
increased
hopper
performance,
because
take-off
and
landing
accelerations
can
be
higher.
Rover performance
is
severely
limited
by
the
requirement
for
continuous
surveillance
of
lurain
while
traveling
from
point
to
point,
but
remote
operators
on
earth
require
surveillance
from
hoppers
only
part
of the
traveling
time.
Scientific
instrument
packages
for
either
rover
or
hopper
should
have
about
the
same
weights.
However,
an
un-
manned
hopper
needs no
wheels
or
large
electric motors
and
requires
much
less
electrical
power
for
locomotion.
An
attitude control
and
abort
system
is
needed
for
hoppers.
Thus,
both
types
of
vehicles
may
have comparable
weights.
A
candidate unmanned
hopper
is
illustrated
in
Fig.
12.
This
concept
differs
from
the
terrestrial
demonstrator
in
that
it
has
all
required sub-systems
for
remote
operation
and
incorporates
two
thrust
leg
mechanisms.
Each
leg
is
used
for
alternate
hops,
i.e.,
the
leg
used
for
take-
off
is
also
used
for
landing
but
is
idle
during
the
next
hop.
During
ballistic
flight
the
legs
rotate
in
opposite
directions
and
exchange
positions
so
that
the
idle
leg
is
ready
for
the
next
hop
as
soon
as
landing
is
completed.
Plane
changes
are
accomplished
with
supporting
leg
mechanisms.
The
primary
source
of
electrical
power
is
an
array
of
solarcells
on
the
top dome.
A
radioisotope
supply
is
used
for
main-
taining instrument
temperatures
during
lunar
nights.
Two
television
cameras
are
required
for
bifocal
capability,
and
others
may
be
desirable
for
on-site
observations.
38

Laser
reflector
-
Guidance
TV
(2)
3truments
Support
legs
(4)
Radioisotope
Figure
12.
Candidate
Unmanned
Hopper
Configuration
39

References
1.
Seifert,
Howard
S.,
"The
Lunar
Pogo
Stick,"
J.
Spacecraft
and
Rockets,
Vol.
4,
No.
7,
July,1967,
pp.
941-943.
2.
Kaplan,
Marshall
H.,
and
Seifert,
Howard
S.,
"Hopping
Transporters
for
Lunar
Exploration,"
J.
Spacecraft
and
Rockets,
Vol.
6,
No.
8,
August,
1969,
pp.
917-922.
3.
Kaplan,
Marshall
H.,
and
Seifert,
Howard
S.,
"Investigation
of
a
Hopping Transporter
Concept
for
Lunar Exploration,"
Department
of
Aeronautics
and
Astronautics,
Stanford
University,
SUDAAR
No. 348,
June,1968.
4.
Seifert,
H.,
et
al,
"Small Scale
Lunar
Surface
Personnel
Transporter
Employing
the
Hopping Mode,"
SUDAAR
No. 359,
Department
of
Aero-
nautics
and
Astronautics,
Stanford
University,
September,
1968.
5.
Seifert,
H.,
et
al,
"Small
Scale
Lunar
Surface
Personnel
Transporter
Employing
the
Hopping
Mode,"
SUDAAR
No. 377,
Department-of
Aeronautics
and
Astronautics,
Stanford University,
May,1969.
6.
Seifert,
H.,
et
al,
"Small
Scale
Lunar
Surface
Personnel
Transporter
Employing
the
Hopping
Mode," SUDAAR
No.
397,
Department
of
Aeronautics
and
Astronautics,
Stanford University,
September,
1970.
7.
Degner,
Raymond
L.,
"Effects
of
Cyclic
Acceleration
Pulses
on
Primates,"
Ph.D.
dissertation,
Mechanical
Engineering
Department,
Stanford
University,
July
1971.
8.
Gillies,
J.A.,
ed.,
A
Textbook
of
Aviation
Physiology,
Pergamon
Press, Oxford,
1965,
pp.
843-850.
9.
Levy,
Steven
E.,
M.D.,
"Fat
Embolism:
An
Important
Cause
of
Morbidity
and
Mortality
Following
Trauma,"
The
Journal
of
Trauma,
Vol.
12,
pp.3-31, October,
1970.
10.
Lee,
Richard
A.
and
Pradko,
Fred,
"Analytical
Analysis
of
Human
Vibration,"
SAE
Transactions,
Vol.
77,
Paper
No.
680091,
1968.
11.
Pasternack,
Sam,
Jr.,
"Attitude
Control
of
Hopping
Vehicles,"
Ph.D.
dissertation,
Department
of
Aeronautics
and
Astronautics,
Stanford
University,
May,
1971.
12.
Meetin,
Ronald,
"Propulsion
and
Ballistics
of
Lunar
Hopping
Vehicles,"
Ph.D.
dissertation,
Department
of
Aeronuatics
and
Astronautics,
Stanford University,
October,
1971.
40
13.
Peterson,
Stephen,
"A
Terrestrial
Prototype
of
a
Hopping
Lunar
Transporter,"
Engineers
thesis,
Mechanical
Engineering
Department,
Stanford
University,
July,
1971.
14.
Aviation
Week
and
Space
Technology,
February
22,
1971,
pp.22-23.
15.
Wong,
R.E.,
"Surface
Mobility
Systems
for
Lunar
Exploration,"
SAE
Paper
680373,
presented
at
the
Space
Technology
Conference,
May
8-10,
1968,
Washington,
D.C.
16.
Farquhar,
R.W.,
"The
Utilization
of
Halo
Orbits
in
Advanced
Lunar
Operation,"
NASA-GSFC
X-551-70-449,
December
1970.
41
