
Traffic Safety Program Evaluation: The Empirical Bayes Model
and Mean Reversion Bias
Paul J. Fisher
Independent Researcher
Justin Gallagher
Montana State University
November 23, 2023
Abstract
Motor vehicle fatalities are increasing in the US. The US Department of Transportation
emphasizes the need to implement “proven safety countermeasures,” to reverse the
“crisis on America’s roadways.” Separating the causal safety effect of a traffic policy
from the natural variation in crash rates is challenging. The empirical bayes (EB) model
was developed to correct for regression to the mean estimation bias and is a standard,
widely used methodology in the traffic safety engineering literature. We show that the
EB model does not correct for regression to the mean bias. We show this analytically,
via a placebo Monte Carlo experiment, and in reference to the traffic safety literature.
We demonstrate the shortcomings of the EB model and our recommendations for how
to improve the reliability of traffic safety studies using 20 years of data (2003-2022) on
all vehicle crashes in San Antonio, TX.
Keywords: Traffic Safety, Mean Reversion, Empirical Bayes, Red-light Cameras
Contact information: [email protected]. We thank Taurey Carr, Max Ellingsen, Elliane Hall, and Sadiq
Salimi Rad for excellent research assistance. The project benefited from conversations with Ahmed Al-Kaisy and feedback from
seminar participants at Montana State University.

“The empirical Bayes (EB) method for the estimation of safety increases the
precision of estimation and corrects for regression-to-mean bias.”
- Hauer et al. (2002), Transportation Research Record, p126
“The EB method pulls the crash count towards the mean, accounting for RTM
bias.”
- US Department of Transportation (2023), Highway Safety Improvement Program
Manual - Safety, p4
1 Introduction
Motor vehicle fatalities are increasing in the US. Fatalities increased by 10.5% from 2020 to
2021. The fatality rate is 18% higher than in 2019 (National Highway Traffic Safety Ad-
ministration [2022]). The US Transportation Secretary referred to this reversal in roadway
safety as a “crisis on America’s roadways” (National Highway Traffic Safety Administra-
tion [2022b]). The US Department of Transportation (USDOT) emphasizes the need to
implement “proven safety countermeasures” to meet this crisis (USDOT [2023]).
Regression to the mean (RTM) is a well-known challenge in measuring roadway risk and in
evaluating the effectiveness of safety countermeasures (USDOT [2023b]). Naturally occurring
variation in the number of crashes can be misinterpreted as evidence that a traffic intervention
improves safety (e.g., Gallagher and Fisher [2020]). Roadway safety interventions often occur
following years when there is an unusually high number of crashes. We would expect the
number of crashes to be lower the following year, regardless of whether there is any safety
intervention.
Separating the causal safety effect of a traffic policy from the natural variation in crashes
is challenging. The empirical bayes (EB) model was developed to correct for RTM estimation
bias (e.g., Abbess et al. [1981]; Hauer [1986]). The EB model is a standard, widely used
methodology in the traffic safety engineering literature. The popularity of the EB model
stems from the belief that the model “corrects” for RTM bias (e.g., Hauer et al. [2002],
p126). The EB model is the preferred research methodology for both the USDOT and
the American Association of State Highway and Transportation Officials (Highway Safety
Manual [2023], Section 3). The USDOT recommends the EB model to “control for RTM”
(USDOT [2007], p3) and asserts that the EB method “account[s] for RTM bias” (USDOT
[2023c], p4).
We show that the EB model does not correct for RTM bias. The EB model can lessen
RTM bias, but never fully account for the bias. Moreover, the EB model, as commonly
applied in the transportation and safety engineering literature, corrects for very little RTM
1
bias. We first show this analytically. Next, we run a placebo Monte Carlo policy experiment.
Our Monte Carlo analysis shows that the EB model performs particularly poorly when there
is a high amount of unexplained variation in the crash data and when researchers select
modeling weights to produce the most efficient estimator.
In Section 5, we evaluate a placebo traffic intersection safety program using twenty years
of data (2003-2022) on all vehicle crashes in San Antonio, TX, the 12th largest city in North
America. We refer to this non-existent safety intervention as a “placebo red-light camera
program,” although the placebo policy could be any intersection safety countermeasure.
Red-light camera (RLC) programs are common in US cities. San Antonio is one of the
few large cities never to have had a RLC program (Insurance Institute for Highway Safety
[2023]). Meta-analyses, which almost exclusively summarize studies that use the EB model,
conclude that RLC programs dramatically reduce the number of total crashes (Høye [2013];
Goldenbeld et al. [2019]). We show that a simple before-after model implies a 12% reduction
in total crashes, when intersections are selected for the placebo treatment using selection
criteria similar to that used in other cities with actual RLC programs. We then show that
the standard EB model does not correct for mean reversion in this setting. The EB model
is severely biased towards finding that RLC programs improve safety.
The USDOT rightly states that “program and project evaluations help agencies deter-
mine which countermeasures are most effective in saving lives and reducing injuries” (USDOT
[2023c], p16). However, policy evaluations are only helpful if they provide unbiased estimates
for the causal impact of the safety measure being studied. The final section provides recom-
mendations for how to improve the reliability of traffic safety studies, given that researchers
can not rely on the EB model to correct for RTM bias. We propose diagnostic tests that
will help researchers gauge the potential RTM bias from using an EB model in a particular
setting. We also draw a parallel to the program evaluation literature in labor economics,
which confronted a similar sample selection problem (e.g., Ashenfelter [1978]; Ashenfelter
and Card [1985]; LaLonde [1986]). The solutions proposed by this literature are illustrative:
the importance of transparent analysis of the raw data, recognition that conventional models
do not solve RTM (and sample selection) bias, an emphasis on careful sample construction,
and the development of new research designs.
2 The Empirical Bayes Model
Road locations targeted for safety countermeasures are not randomly selected. The main
selection concern is that roadway locations (i.e. road segments or intersections) where safety
measures are implemented (“treated” locations) are often chosen based on their underlying
crash risk, or because of recent trends in the number of crashes. Model estimates for how a
2

safety measure impacts the number of crashes will generally be biased when the underlying
risk differences are not taken into account, or when naturally occurring variation in the
number of crashes is misinterpreted as part of the causal safety treatment effect.
Treated roadway locations are often selected due to the large number of recent crashes.
A simple before-after model that evaluates the effectiveness of the safety countermeasure
using the time period just before the treatment as the baseline level of crashes will lead to a
safety treatment estimate that is too large. The reason is that the baseline level of crashes
is artificially high due to naturally occurring variation in the number of crashes. The EB
model (e.g., Abbess et al. [1981]; Hauer [1986]; Hauer et al. [2002]) seeks to account for
this bias by adjusting the baseline level of crashes downwards at treated locations, so as to
eliminate RTM bias and to estimate an unbiased treatment effect.
Below we highlight the key steps to estimate the EB model. In the next section, we
provide details for our two main criticisms of the EB model: (1) the EB model does not
correct for RTM bias, and (2) as applied in the literature, the EB model will usually adjust
for only a small amount of RTM bias.
The first step to estimate the EB model is to specify a structural model of vehicle crashes,
referred to as the Safety Performance Function (SPF).
1
The SPF is supposed to accurately
characterize the deterministic relationship between the number of crashes and the variables
that cause these crashes. The SPF is estimated using out-of-sample data. The traffic en-
gineering literature usually estimates the SPF with a negative binomial regression. The
estimated SPF parameters are then applied to the sample locations to generate predictions
for the pre-treatment and post-treatment number of crashes,
\
E(k
i
) and
\
E(λ
i
), respectively.
Note that in the EB model, there is no difference between sample locations and treated loca-
tions. The entire sample is comprised of locations where the safety measure is implemented.
Next, use the predicted number of crashes for the sample locations in the pre-treatment
period to adjust the actual crashes observed at these locations. This is the key modeling
step. The adjustment is supposed to account for random variation in the number of crashes
at sample locations that would otherwise lead to RTM bias. In practice, this is done by
calculating a weighted average of the actual and predicted number of crashes (Equation 1).
K
i
is the actual number of crashes at the sample locations during the pre-period. ˆw
i
∈ (0, 1)
is the weight.
\
E(k
i
|K
i
) = ˆw
i
\
E(k
i
) + (1 − ˆw
i
)K
i
(1)
1
Throughout our discussion we assume that all roadway locations are a constant length (e.g. an intersec-
tion or a 1km road segment). See Hauer [1997], Hauer et al. [2002], and Highway Safety Manual [2023] for
detailed discussions on how to estimate the model, including: framing the estimated treatment effect as the
safety index, and adjustments that are necessary when sample locations are of varying lengths.
3

Equation 2 shows that ˆw
i
is a ratio of two components that are estimated using the SPF.
\
V (k
i
) is the estimated variance in the number of pre-treatment crashes for sample location
i.
\
V (k
i
) =
\
E(k
i
)
2
ϕ
when estimating the model using a negative binomial regression, where ϕ
is the estimated overdispersion parameter.
ˆw
i
=
\
E(k
i
)
\
E(k
i
) +
\
V (k
i
)
=
1
1 +
\
E(k
i
)
ϕ
(2)
Equation 3 calculates the predicted crashes at each sample location in the post-treatment
period in the absence of a safety intervention. The assumption is that ˆq
i
=
\
E(λ
i
)
\
E(k
i
)
reflects how
the number of crashes would have evolved over time if the location was never treated.
ˆπ
i
= ˆq
i
\
E(k
i
|K
i
) (3)
The estimated causal effect of a new traffic policy or engineering safety measure on the
number of crashes is calculated as
ˆ
δ = λ − ˆπ. λ is the sum of the actual number of crashes
at sample locations in the post-treatment. ˆπ is the sum of predicted crashes at sample
locations in the post-treatment. The average causal effect of implementing a safety measure
at a sample location is
¯
ˆ
δ =
¯
λ −
¯
ˆπ, where
¯
ˆ
δ =
1
N
P
N
i=1
ˆ
δ
i
(and similarly for
¯
ˆπ and
¯
λ).
¯
ˆ
δ
i
is
an unbiased causal estimate for a safety intervention if ˆπ
i
is an unbiased estimate for the
predicted crashes at each sample location in the absence of an intervention.
Figure 1: EB Model Causal Effect for a Safety Countermeasure
4
Figure 1 depicts the EB model for sample location i. The y-axis measures the number
of crashes, while the x-axis is time. The vertical line in the middle of the figure indicates
the introduction of a safety countermeasure (treatment). The points to the left (right) of
the vertical line are calculated over the entire pre-treatment (post-treatment) period. The
estimated causal effect of the safety countermeasure is represented by the vertical distance
between ˆπ
i
and λ
i
. We illustrate the case where there is no change in the expected number
of crashes (i.e. ˆq
i
= 1) and ˆw
i
is approximately 0.5.
3 The Empirical Bayes Model and RTM Bias
The EB model does not correct for RTM bias. There are two related reasons. First, the
modeling of the SPF. Second, how the EB model ostensibly corrects for mean reversion.
In our discussion, we reference a sample of forty research papers from the published traffic
safety engineering literature. We select the papers based on citation counts to highlight the
large variety of safety interventions evaluated using the EB model (Table 1).
3.1 Modeling the Safety Performance Function
The EB model relies on the correct specification of the SPF. Estimates from the SPF are
used as a way to reduce RTM bias, and to adjust the observed crash data for calendar time
trends. Numerous driver, vehicle, and roadway factors correlate with crash risk and fatality
rates (e.g., World Health Organization [2022]). However, many EB models estimate a very
parsimonious SPF. The median number of independent crash risk variables included in the
SPF models for the papers in our literature review is two.
In our view, there are two likely reasons why researchers tend to include so few explana-
tory variables when modeling crashes. First, methodological papers often demonstrate the
EB model using a parsimonious SPF. Hauer et al. [2002], a highly cited tutorial, specifies
the SPF using just a single independent variable. Second, in most research settings, detailed
data are unavailable for many factors that correlate with crash rates.
A direct consequence of estimating a SPF with few explanatory variables is that the SPF
is likely to do a poor job explaining the observed variation in crashes. Only 30% of the
studies in our literature review report the amount of crash variation explained by the SPF
model. For example, only around half the crash variation is explained by the SPF models
in Montella et al. [2015]. This is a concern because the SPF is the main modeling tool to
reduce RTM bias.
Roadway locations selected for safety interventions tend to be more risky, on average,
than unselected locations. The EB model applies SPF coefficient estimates that are typically
estimated from lower risk out-of-sample locations to predict crash levels at riskier sample
5

Table 1: Empirical Bayes Model Literature Review, EB Model Language
Study Topic
EB Model and RTM bias language
Himes et al. (2016) Accident Prevention Tech.
"this methodology is considered rigorous in that it accounts for regression to the mean" p9
Rahman et al. (2020) Accident Prevention Tech.
"the present study used the EB method […] as it accounts for the regression-to-mean bias" p51
Claros et al. (2015) Alternative Intersections
"to account
for […] resulting regression to the mean, the Highway Safety Manual recommends […] empirical Bayes" p6
Edara et al. (2015) Alternative Intersections
"an empirical Bayes analysis to account
for regression to the mean" p12
Gross et al. (2013) Alternative Intersections
"empirical Bayes (EB) methodology to control for regression-to-the-mean" p235
Le et al. (2017) Cost-Benefit Analysis
"EB method is considered rigorous in that it accounts for regression to the mean" p81
Jung (2017) Driving Behavior
"EB and FB methods can increase the precision of the estimation and correct for the regression-to-the-mean bias" p358
Montella (2010) Hot Spot Identification
"EB method increases the precision of the safety estimation and corrects for the regression-to-mean bias" p577
Persaud et al. (2010) Methodology
"this procedure accounts for regression-to-the-mean effects" p38
Yu et al. (2014) Methodology
None
Brewer et al. (2012) Passing Zones
None
Park et al. (2012) Passing Zones
"empirical Bayes (EB) method […] is superior to other methods because it can address
the regression-to-the-mean bias" p38
Persaud et al. (2013) Passing Zones
"because of changes in safety [...] from regression to the mean [...] the count of crashes before a treatment by itself is not a good estimate" p60
Gouda et al. (2020) Pavement Quality
"the before-and-after EB technique […] accounts for critical analysis limitations […] such as regression-to the-mean (RTM)" p93
Park et al. (2017) Pavement Quality
"CMFs [developed using empirical Bayes] can account for the regression-to-the-mean threat" p78
Peel et al. (2017) Pavement Quality
"empirical Bayes […] accurately reflects anticipated changes in crash frequencies […] that may be attributable to regression to the mean bias" p12
Park et al. (2015) Pedestrian, Cyclist Safety
"The main advantage of the EB method is that it can account for […] regression-to-the-mean (RTM) effects" p181
Strauss et al. (2015) Pedestrian, Cyclist Safety
None
Strauss et al. (2017) Pedestrian, Cyclist Safety
None
Goh et al. (2013) Public Transportation
"[empirical Bayes method] key strength is its ability to account
for regression to the mean (RTM) effects" p43
Naznin et al. (2016) Public Transportation
"using the empirical Bayes (EB) method […] account[s] for wider crash trends and regression to the mean effects" p91
Ahmed et al. (2015) Red Light Cameras
"to account for the possible regression-to-the-mean (RTM) bias […] Empirical Bayes (EB) method should be adopted" p133
Ko et al. (2017) Red Light Cameras
"this study uses an EB methodology to address
regression-to-mean (RTM) bias" p118
Pulugurtha et al. (2014) Red Light Cameras
"EB method […] minimizes the regression-to-mean bias in a sample and gives valid results even for small samples" p11
Park et al. (2019) Road Signage
"EB methods have been regarded as statistically defensible methods that can cope
with […] regression-to-the-mean bias" p3
Wood et al. (2020) Road Signage
None
Wu et al. (2020) Road Signage
"before-and-after evaluation with the EB method, as proposed by Hauer, which explicitly addresses the RTM effect" p423
Cafiso et al. (2017) Road Shoulders, Barriers
"The methodology [empirical Bayes] has the great advantage to account for the regression to the mean effects" p324
Chimba et al. (2017) Road Shoulders, Barriers
"The EB uses before-and-after procedures which properly account for regression to the mean bias"
Park et al. (2012) Road Shoulders, Barriers
"The EB method can account for the effect of regression-to-the mean" p318
Park et al. (2016) Road Shoulders, Barriers
"main advantage of the EB method is that it can account for […] regression-to-the-mean effects" p33
Khan et al. (2015) Rumble Strips
"[EB method] address[es] the limitation of the Naïve and CG Methods by accounting for the regression-to-the-mean effect" p36
Park et al. (2015) Rumble Strips
"main advantage of the EB method is that it can account for […] regression-to-the mean (RTM) effects" p313
Park et al. (2014) Rumble Strips
"main advantage of the EB method is that it can account for […] regression-to-the mean (RTM) effects" p170
De Pauw et al. (2018) Speed Limits, Enforcement
"EB approach increases the precision of estimation and corrects for the regression-to the-mean (RTM) bias" p85
Montella et al. (2012) Speed Limits, Enforcement
"the empirical Bayes methodology […] properly accounts for regression to the mean" p17
Montella et al. (2015) Speed Limits, Enforcement
"this [empirical Bayes] methodology is rigorous and properly accounts for regression-to-the-mean" p168
Jin et al. (2021) Turn Lanes, Traffic Signals
None
Khattak et al. (2018) Turn Lanes, Traffic Signals
"The E-B method eliminates regression to the mean (RTM) bias" p124
Srinivasan et al. (2012) Turn Lanes, Traffic Signals
"state-of-the-art before-after empirical Bayes method because it has been shown to properly account for regression to the mean" p109
Studies were selected based on topic and citation count from the following journals (2010-2022): Accident Analysis & Prevention, Analytic Models
in Accident Research, Journal of Safety Research, Traffic Injury Prevention, Transportation Research Record, Transportation Research Part A-F,
Transportation Science.
6

locations. The sample and out-of-sample locations are likely to differ based on one or more
of the many crash risk factors omitted from the SPF. This will generally lead the crash risk
parameters estimated on the out-of-sample locations to be biased estimators for the sample
locations (e.g., LaLonde [1986]; Greene [2003]). EB model adjustments for mean reversion
and the passage of time that rely on the SPF will also be biased.
3.2 Adjusting for Mean Reversion
The vast majority of EB studies in our literature review include statements claiming that the
model “corrects” or “accounts” (or similar) for mean reversion (Table 1). These statements
repeat the language used by leading EB model advocates (Hauer et al. [2002]; USDOT
[2023c]).
Equation 1 is the key modeling step that adjusts for mean reversion. Equation 1 calculates
a weighted average of the actual and predicted number of pre-treatment crashes at sample
locations. The assumption is that the SPF will provide an estimate,
\
E(k
i
), that is non-mean
reverting and unbiased. Even if this assumption is true, Equation 1 will only eliminate mean
reversion when all of the weight, ˆw
i
, is on the predicted number of crashes. The weighted
average will be mean reverting when the pre-treatment crash levels are mean reverting and
ˆw
i
∈ (0, 1).
Figure 2 depicts the two potential sources of bias (SPF misspecification and RTM) in the
EB model. The figure is similar to Figure 1, except that the plotted points are for a sample
of locations, rather than for a single location and the points in the figure are averages across
the sample.
The vertical distance between
¯
K and
\
E(k
i
)
T rue
in Figure 2 shows the anticipated mean
reversion that will occur in years following a safety intervention at treated locations when the
SPF is correctly estimated, regardless of the actual effectiveness of the safety intervention.
The figure shows three estimates for the average causal effect for a safety countermeasure
using the EB model. The true causal effect is shown by the vertical line (1). The EB model
only provides an unbiased estimate when the SPF is correctly specified and all of the weight
in Equation 1 is on the SPF estimate for all sample locations. Vertical line (2) shows how the
causal effect will suffer from RTM bias, even when the SPF is correctly specified. Vertical
line (3) shows how the causal effect can be biased from SPF misspecification. Note that we
illustrate the case where there is no change in the expected number of crashes (i.e. ˆq
i
= 1)
and ˆw
i
is 0.5 for all sample locations. Our critique of the EB model holds for any value of
ˆq
i
and for ˆw
i
∈ (0, 1).
7

Figure 2: EB Model RTM and SPF Misspecification Bias
3.3 EB Model Only Reduces a Small Amount of RTM Bias
Equation 2 shows how the weight, ˆw
i
, is calculated. This equation is used to calculate the
weight because it minimizes the variance of
\
E(k
i
|K
i
) (e.g., Hauer [1997]). In practice, the
EB model is generally estimated with a small ˆw
i
. The reason is that high crash locations are
most likely to be selected for an intervention. High crash locations have a larger expected
crash to overdispersion parameter ratio (
\
E(k
i
)
ϕ
), as compared to other potential locations.
A small ˆw
i
implies that the (mean-reverting) number of crashes is weighted more heavily
when calculating the expected number of crashes at sample locations (see Equation 1).
None of the studies from our detailed review specify the average weights used in the SPF.
For example, Ko et al. [2017] evaluate the city of Houston’s red-light camera program. RTM
bias is a serious concern in this setting. Houston officials selected signal intersections for the
red-light camera safety intervention based on the unusually high number of crashes at these
intersections in the years just prior to the start of the program (e.g., Gallagher and Fisher
[2020]; Stein et al. [2006]). The number of crashes at these Houston intersections would be
expected to decrease in subsequent years due to mean reversion regardless of the camera
program.
We estimate the EB model on our own sample of Houston red-light camera intersections,
8

using a parsimonious SPF model similar to that of Ko et al. [2017]. We calculate an average
ˆw
i
less than 0.1. The EB model only eliminates a very small amount of RTM bias.
4 Monte Carlo Simulation Experiment
We generate crash data and simulate a placebo experiment to evaluate the effectiveness of
the EB model at correcting for RTM bias.
4.1 Data Generating Process
We follow the literature and model crashes using a negative binomial distribution. We
generate crash data using Equation 4. The number of crashes at a location is positively
correlated with Average Daily Traffic (ADT). ADT
i
is constant over time at the location
level, drawn from an exponentiated uniform distribution, and can be interpreted as the
number (in hundreds of thousands) of vehicles passing through a location each day.
Crashes
it
= poisson(gamma
exp(α + 0.05ADT
i
)
ϕ
, ϕ) (4)
The overdispersion parameter, ϕ, allows for the variance in the number of crashes to be
larger than the variance for a poisson distribution with the same mean (e.g., Cameron and
Trivedi [2005]). The overdispersion parameter is a key input into the recommended weight
commonly used in the EB model literature (Equation 2). Typically, greater overdispersion
implies a larger crash variance and a smaller ˆw
i
.
In our simulations, we vary ϕ to isolate how ˆw
i
affects RTM bias in the EB model, while
holding the crash variance constant across the generated datasets.
2
We select α conditional
on ϕ to generate weights, while holding the crash variance constant. We simulate crash data
using 56 different values of the overdispersion parameter that lead to ˆw
i
∈ (0, 0.97], and
create one hundred datasets for each of the 56 parameterizations. Each dataset includes
10,000 locations (i) and six time periods (t) for a total sample size of 60,000.
4.2 Placebo Safety Policy Experiment
We estimate the effect of a placebo safety policy with a true effect of zero using a before-
after model and the EB model. The Monte Carlo experiment focuses on potential RTM bias,
since the estimated SPF matches the true crash data generating process. We assume that a
placebo safety policy is implemented following period three. The first three time periods are
considered “pre-policy”, while periods four to six are “post-policy”. The placebo treatment
2
We also run a Monte Carlo simulation that allows the crash variance to differ between datasets. The
(poor) performance of the EB model in eliminating RTM bias is very similar.
9
is assigned to the 500 locations with the highest number of crashes in the three pre-policy
periods. These 500 locations comprise our treatment sample in each dataset, while the other
9,500 locations are the out-of-sample locations used to estimate the SPF.
We chose the panel length based on the recommendation in the literature that using the
three most recent pre-policy years are sufficient to reliably estimate the EB model. In fact,
confidence in the EB model to eliminate RTM bias, combined with a concern that earlier
years may not reflect a location’s current underlying crash risk, lead many researchers to
avoid the use of crash information for earlier years (e.g., Hauer et al. [2002]).
The USDOT motivates the EB model as best practice by stating that the EB model
“account[s] for RTM bias” that would otherwise occur when using a “naive” before-after
model (USDOT [2023c]). In our setting, estimates from a before-after model wrongly suggest
that the placebo policy reduces vehicle crashes. This follows from the fact that there is no
actual safety policy, and because the sample locations are selected based on an unusually
high number of pre-policy crashes. The number of crashes is lower after the placebo policy
due to mean reversion. The average before-after model estimate across our Monte Carlo
samples is approximately -80%.
Figure 3a shows the results of our simulation. We follow the USDOT and use a before-
after model as a baseline to measure whether the EB model corrects for RTM bias (USDOT
[2023c]). The vertical axis plots the ratio of the EB estimate to the before-after model
estimate for the same sample and simulation. We interpret the y-axis as the percentage
of mean reversion remaining when using the EB model. The x-axis measures the average
SPF weight (
¯
ˆw
i
) used for each sample and simulation. There is a clear negative correlation
between the SPF weight and the level of RTM bias. As expected, EB models that use small
weights correct for very little RTM bias.
5 San Antonio Crash Analysis
The San Antonio analysis is motivated by the EB modeling literature, which concludes that
red-light camera programs are highly effective in reducing the total number of crashes (e.g.,
Høye [2013]; Goldenbeld et al. [2019]). We demonstrate the shortcomings of the EB model
in correcting for RTM bias using 20 years (2003-2022) of data on all reported vehicle crashes
in San Antonio, TX.
5.1 Data
The crash data are from the Texas Department of Transportation’s Crash Records Infor-
mation System (CRIS) database. CRIS stores information on all TX vehicle crashes. The
10
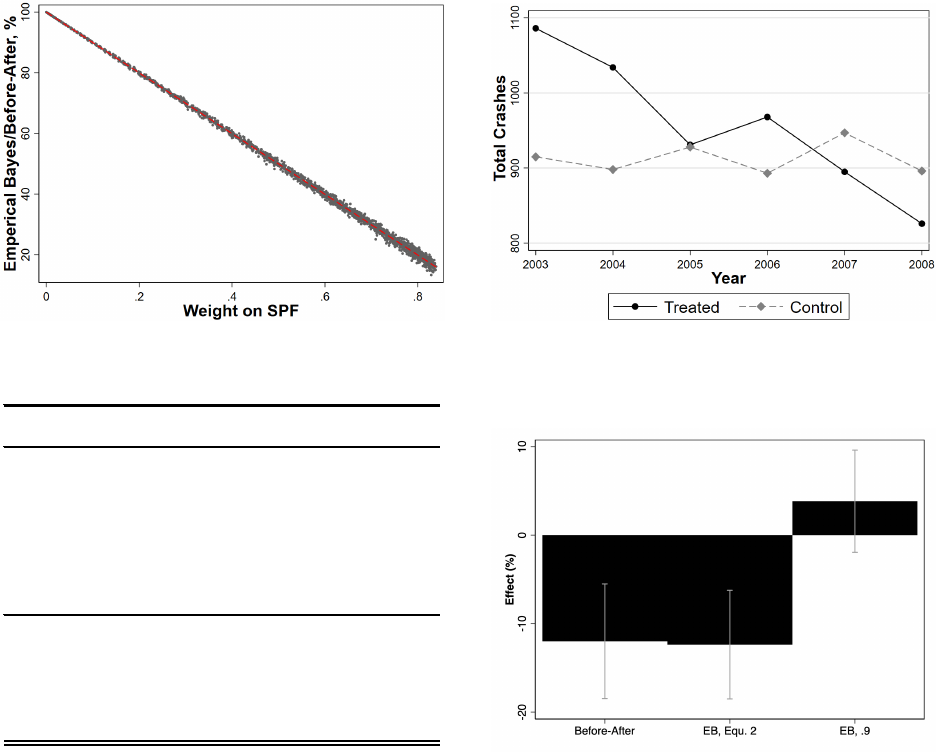
Figure 3: Monte Carlo and San Antonio Placebo Policy Analyses
(a) Remaining RTM Bias (b) Crash Trends in San Antonio, TX
Dependent Variable: Total Crashes
Average Daily Traffic -0.0000026
(0.0000067)
Risk Proxy
0.077
(0.021)
Psuedo R-Squared 0.042
Overdispersion 0.15
Avg weight, treated obs 0.139
Observations 44
(c) SPF Model for San Antonio, TX (d) EB Model Placebo Treatment Effect
information in CRIS is compiled by law enforcement personnel and includes the crash loca-
tion (latitude and longitude) and whether the crash was “in or related to” an intersection.
We use GIS software to identify the yearly count of crashes that are “in or related to” one of
624 major San Antonio intersections. Next, we spatially join all georeferenced crashes that
are within 200 feet of a major intersection and within 50 feet of an intersecting road that
passes through the intersection. We define an intersection crash as within 200 feet based
on evidence that the number of crashes within 200 feet of an intersection in Houston, TX
during the same time period is several times higher than at any distance greater than 200
feet (Gallagher and Fisher [2020]).
We also collect average daily traffic (ADT) information for each intersection (North
Central Texas Council of Governments [2016]). Not all roadways are surveyed each year.
11
ADT, calculated as the average across all intersecting roads at an intersection, is available
once for each intersection during the first three years of our panel. The final panel for
our analysis is a yearly intersection-level database that sums the number of crashes at each
intersection.
5.2 Placebo Safety Policy
San Antonio is one of the few large North American cities never to have had a red-light
camera program (Insurance Institute for Highway Safety (2023)). RLC programs use video
cameras to monitor signalized intersections for red-light running. The aim is to reduce
the total number of crashes, and especially injury-related crashes, through a reduction in
collisions involving vehicles running a red light. We focus our analysis on 2003-2008 because
ADT is available for each intersection 2003-2005. We evaluate a placebo intersection safety
countermeasure that we call a RLC program. We assume the policy is implemented in 2006.
We assign the placebo safety intervention to the 50 intersections with the largest number of
crashes 2003-2005. This selection criteria closely follows how Houston selected intersections
for its RLC program (Stein et al. [2006]; Gallagher and Fisher [2020]). The effect of the
program is analyzed using three post-treatment years 2006-2008.
Figure 3b plots the total number of crashes at the “treated” and “control” intersections
by year. The number of crashes is stable at the control intersections before and after the
placebo safety policy. The average total number of yearly crashes at the control intersection
is 914 before the policy and 912 after the policy. In sharp contrast, the number of crashes
at treated intersections decreased by 12% from 1,017 pre-policy to 896 post-policy.
5.3 Model Results
We evaluate the placebo program using a simple before-after model and the EB model. The
before-after model implies that the program led to a 12% reduction in crashes (Figure 3d).
The entire estimated reduction in the before-after model is due to mean reversion. There is
no evidence of an overall trend in crashes at the non-treated intersections (Figure 3b).
Our review of two recent meta-analyses on the safety effectiveness of RLC programs
reveals that most of these studies use the EB model and a parsimonious SPF ([Høye, 2013];
[Goldenbeld et al., 2019]). The median number of independent variables in the SPF is two.
ADT is included in every SPF. We follow the literature in our analysis and also specify an
SPF with two independent variables and include ADT as one of the variables. The second
variable in our SPF is a proxy for crash risk, measured as the yearly mean number crashes at
the intersection from 2003-2022. Twenty years of actual crash data provides a good measure
of the true crash risk at each intersection. The variable is a proxy because it does not reflect
12

changes to the roadways or city-wide driving patterns that may have altered the underlying
crash risk. We do not claim to have modeled a correct SPF. Our aim is to specify a SPF
model in line with the current literature.
A critical decision in any EB model analysis is how to specify the control group when
estimating the SPF. The crash-related characteristics of the control group should closely
match those of the treated group. We use the risk proxy variable to limit out-of-sample San
Antonio control intersections to those with a risk proxy in the same range as the treated
intersections. All potential control intersections with an average number of yearly crashes
(2003-2022) of less than 5.0 or greater than 29.4 are excluded from the analysis. We estimate
the SPF on a sample of 44 control intersections.
Figure 3c shows results from using a binomial regression to estimate our SPF. The table
lists parameter estimates and standard errors (in parentheses) for the independent variables.
The estimated coefficients can be interpreted as semi-elasticities. We estimate that a one
crash per year increase in the risk proxy increases the average number of yearly crashes at the
intersection in the placebo pre-period (2003-2005) by approximately 8 percent (probability
value < 0.01).
Figure 3d displays the before-after and EB model point estimates. We estimate the
EB model using two different sets of model weights ( ˆw
i
). The recommended approach in
the literature is to use Equation 2 to determine ˆw
i
for each treated intersection. When we
use the recommended approach, we estimate an average weight of 0.14 (Figure 3c), and a
placebo policy treatment effect of -12% (Figure 3d, middle column). The figure shows the
95% confidence interval in brackets.
3
The EB model estimate is very similar to the before-
after estimate. Both estimates suffer from substantial RTM bias. In the third column of
Figure 3d we estimate the EB model using a fixed weight of 0.9 for all intersections. The
estimated average placebo safety treatment effect is small in magnitude and not statistically
different from zero.
6 Discussion and Recommendations
We provide the following recommendations for researchers and practitioners who continue
to use the EB model, or who seek alternative models to evaluate traffic safety interventions.
6.1 Better Selection of Intervention Sites
Safety interventions should target high risk road locations to most improve roadway safety.
However, a treatment selection process where the selection criteria emphasize recent spikes
3
We calculate bootstrapped standard errors using a non-parametric bootstrap procedure and 1,000 boot-
strap samples (e.g., Efron and Tibshirani [1993]; Cameron and Trivedi [2005]).
13
in crashes, rather than the underlying crash risk, will lead to mean reversion and complicate
evaluation of the safety intervention.
Mean reversion induced by the site selection method can be reduced by limiting the role
that year-to-year variation in crash outcomes plays in selecting treatment locations. First,
select locations for a safety intervention using more years of crash data (e.g. 10 years rather
than 2-3 years as is common). Second, practitioners can minimize selection based on mean
reverting temporal trends by excluding the most recent crash data (e.g., Ashenfelter [1978]).
This is in direct contrast to the current recommendation in the EB modeling literature
(e.g., Hauer et al. [2002]). Third, avoid using infrequent crash outcomes, such as fatalities,
to measure roadway risk when assigning safety interventions. Even the most dangerous
locations often have years with no fatal crashes. An assignment criteria that includes all
crashes, while weighting the more severe crashes, will provide a more stable measure of risk
over time and reduce mean reversion. The most effective method for site selection is to
randomize the intervention across a sample of (pre-selected) locations, and then to evaluate
the treatment effect using a randomized controlled trial (e.g., Elvik [2021]).
Practitioners can evaluate whether the selection process is likely to lead to treated lo-
cations characterized by mean reversion. Use the site selection criteria to create proposed
lists of treated locations using different pre-treatment time periods. If the proposed treat-
ment locations vary substantially from period to period, then the selection criteria is mainly
picking up on temporal trends and doing a poor job measuring the true underlying crash
risk. Locations assigned safety interventions using these criteria will likely be characterized
by mean reversion and assessing the true impact of the safety intervention will be difficult.
6.2 Improved Application of the Empirical Bayes Method
We recommend updating language to better reflect the ability of the EB method to reduce
RTM bias, reporting additional statistics regarding mean reversion, and selecting a high
weight ( ˆw
i
).
Researchers frequently describe the EB model as “correcting”, “accounting”, “address-
ing”, or “eliminating” RTM bias (Table 1). The Bayesian intuition of combining existing
and new sample information to improve model estimates does not correct for RTM bias. The
EB model will only eliminate RTM bias when the SPF model is specified correctly and when
all weight is placed on the out-of-sample prediction (i.e. ˆw
i
= 1). We recommend that re-
searchers are transparent about these limitations of the model. Moreover, researchers should
report the average ˆw
i
, which provides an indication of the remaining RTM bias relative to
the simple before-after model.
Researchers should set a large weight in the SPF model when there is concern over
14
mean reversion. The standard approach is to estimate Equation 2, which selects ˆw
i
to
minimize the estimated variance of
\
E(k
i
|K
i
) and thereby maximizes the precision of the
EB model. However, there is a trade-off between the duel objectives of eliminating RTM
bias and maximizing precision. We recommend using a fixed weight of 0.9 in settings where
there is suspected mean reversion. A weight of 1.0 would eliminate RTM bias, provided the
SPF is correctly specified, but completely relies on out-of-sample prediction. Moreover, a
weight of 1.0 would no longer reflect the Bayesian approach of combining existing crash risk
information with new crash risk information from the sample locations targeted for a safety
intervention. A weight of 0.9 allows the EB model to largely reduce RTM bias in expectation
(Figure 3a) and in practice (Figure 3d), while still incorporating location specific information
not captured by the SPF.
6.3 Consider Alternative Models for Analysis
The difference-in-differences (DD) model is an attractive alternative to the EB model (e.g.,
Angrist and Pischke [2008]; Roth et al. [2023]). The DD model estimates the effect of a
safety intervention by comparing the change before and after intervention for treated sites to
the same before and after change for the control sites. The DD model allows the researcher
to adjust for mean reversion by selecting control locations that have similar patterns of mean
reversion as treated locations.
The most important part of the DD model is to choose control locations that would have a
similar change in the number of crashes without the intervention. There are several strategies
to choose control locations. First, if researchers know the criteria used by policy makers to
select the treated locations, then similar control locations can be selected using the same
criteria. For example, there may be control locations that meet the same selection criteria,
but were excluded for reasons unrelated to crash risk (e.g. political or budget considerations).
Second, use propensity score matching and trimming to identify sites with similar features
as those receiving the intervention (e.g., Abdulsalam et al. [2017], Gallagher and Fisher
[2020]). Third, use eligible non-selected locations when the organization implementing the
intervention randomizes the treated locations.
7 Conclusion
The empirical bayes model was developed to correct for regression to the mean estimation
bias and is a standard, widely used methodology in the traffic safety engineering literature.
We show that the EB model does not correct for RTM bias. We first show this analyti-
cally using the EB modeling equations. The EB model will lead to causal safety measure
estimates that suffer from RTM bias, unless the EB model completely ignores crash data
15
at the treatment locations. Our Monte Carlo analysis shows that the EB model performs
particularly poorly when there is a high amount of unexplained variation in the crash data
and when researchers select modeling weights to produce the most efficient estimator.
We apply the EB model to analyze a placebo traffic safety program using twenty years
of data (2003-2022) on all vehicle crashes in San Antonio, TX. We refer to this non-existent
safety program as a red-light camera program. We show that a simple before-after model
implies a 12% reduction in total crashes, when intersections are selected for the placebo
treatment using selection criteria similar to that used in other cities with actual RLC pro-
grams. We then show that the standard EB model does not correct for mean reversion in
this setting.
Our recommendations for how to improve the reliability of traffic safety studies include
recognizing that the EB model does not correct for RTM bias, proposed diagnostic tests to
gauge the amount of potential RTM bias from using an EB model, a stronger emphasis on
careful sample construction, and the application of statistical models that are more likely to
correct for RTM bias.
16
8 References
Automated enforcement: A compendium of worldwide evaluations of results. Technical Report
DOT HS 810 763, Department of Transportation, 2007.
Early estimates of motor vehicle traffic fatalities and fatality rate by sub-categories in 2021. Tech-
nical Report DOT HS 813 298, National Highway Traffic Safety Administration, May 2022.
Roadway trafic injuries. Technical report, The World Health Organization, June 2022. URL
https://www.who.int/news-room/fact-sheets/detail/road-traffic-injuries.
Highway safety manual. Technical report, American Association of State Highway and
Transportation Officials, 2023. URL https://www.highwaysafetymanual.org/Pages/
ResearchResources.aspx.
National roadway safety strategy. Technical report, Department of Transportation, 2023a. URL
https://www.transportation.gov/NRSS/SaferRoads.
Applying safety data and analysis to performance-based transportatino planning. Technical
report, Department of Transportation, 2023b. URL https://highways.dot.gov/safety/
zero-deaths/transportation-safety-planning-tsp.
Highway safety improvement program manual. Technical report, Department of Transportation,
2023c. URL https://safety.fhwa.dot.gov/hsip/resources/fhwasa09029/sec6.cfm.
Red light running. Technical report, 2023. URL https://www.iihs.org/topics/
red-light-running#communities-using-red-light-safety-cameras.
Christopher Abbess, Daniel Jarrett, and Catherine C. Wright. Accidents at blackspots: Estimating
the effectiveness of remedial treatment, with special reference to the “regression-to-mean” effect.
Traffic Engineering and Control, 22(10), 1981.
Amal Jasem Abdulsalam, Dane Rowlands, Said M Easa, and Abd El Halim O Abd El Halim. Novel
case-control observational method for assessing effectiveness of red-light cameras. Canadian
Journal of Civil Engineering, 44, 2017.
National Highway Traffic Safety Administration. Newly released estimates show traffic fatalities
reached a 16-year high in 2021. US Department of Transportation, May 2022.
Jon Tommeras Selvik adn Rune Elvik and Eirik Bjorheim Abrahamsen. Can the use of road safety
measures on national roads in norway be interpreted as an informal application of the alarp
principle. Accident Analysis & Prevention, 135, 2020.
17
Mohamed M. Ahmed and Mohamed Abdel-Aty. Evaluation and spatial analysis of automated red-
light running enforcement cameras. Transportation Research Part C: Emerging Technologies, 50,
2015.
Joshua D. Angrist and Jorn-Steffen Pischke. Mostly Harmless Econometrics. Princeton University
Press, 2008.
Orley Ashenfelter. Estimating the effect of training programs on earnings. The Review of Economics
and Statistics, 60, 1978.
Orley Ashenfelter and David Card. Using the longitudinal structure of earnings to estimate the
effect of training programs. The Review of Economics and Statistics, 67, 1985.
Marcus A. Brewer, Steven P. Venglar, Kay Fitzpatrick, Liang Ding, and Byung-Junk Park. Super
2 highways in texas: Operational and safety characteristics. Transportation Research Record:
Journal of the Transportation Research Board, 2301, 2012.
Salvatore Cafiso and Alessandro Di Graziano. Surrogate safety measures for optimizing investments
in local rural road networks. Transportation Research Record: Journal of the Transportation
Research Board, 2237, 2011.
Salvatore Cafiso, Carmelo D’Agostino, and Bhagwant Persaud. Investigating the influence on
safety of retrofitting italian motorways with barriers meeting a new eu standard. Traffic Injury
Prevention, 18, 2017.
A. Colin Cameron and Pravin K. Trivedi. Microeconometrics. Cambridge University Press, 2005.
Deo Chimba, Evarist Ruhazwe, Steve Allen, and Jim Waters. Digesting the safety effectiveness
of cable barrier systems by numbers. Transportation Research Part A: Policy and Practice, 95,
2017.
Mehmet Ali Dereli and Saffet Erdogan. A new model for determining the traffic accident black
spots using gis-aided spatial statistical methods. Transportation Research Part A: Policy and
Practice, 103, 2017.
Praveen Edara, Sawyer Breslow, Carlos Sun, and Boris R. Claros. Empirical evaluation of j-turn
intersection performance: Analysis of conflict measures and crashes. Transportation Research
Record: Journal of the Transportation Research Board, 2486, 2015.
Bradley Efron and R.J. Tibshirani. An Introduction to the Bootstrap. Chapman and Hall, 1993.
Rune Elvik. Why are there so few experimental road safety evaluation studies: Could their findings
explain it? Accident Analysis & Prevention, 163, 2021.
18
Justin Gallagher and Paul J. Fisher. Criminal deterrence when there are offsetting risks: Traffic
cameras, vehicular accidents, and public safety. American Economic Journal: Economic Policy,
12(3), 2020.
Kelvin Chun Keong Goh, Graham Currie, Majid Sarvi, and David Logan. Road safety benefits from
bus priority: An empirical study. Transportation Research Record: Journal of the Transportation
Research Board, 2352, 2013.
Charles Goldenbeld, Stijn Daniels, and Govert Schermers. Red light cameras revisited. recent
evidence on red light camera safety effects. Accident Analysis & Prevention, 128, 2019.
Maged Gouda and Karim El-Basyouny. Before-and-after empirical bayes evaluation of achieving
bare pavement using anti-icing on urban roads. Transportation Research Record: Journal of the
Transportation Research Board, 2674, 2020.
William H. Greene. Econometric Analysis. Prentice Hall, 2003.
Frank Gross, Craig Lyon, Bhagwant Persaud, and Raghavan Srinivasan. Safety effectiveness of
converting signalized intersections to roundabouts. Accident Analysis & Prevention, 50, 2013.
Ezra Hauer. On the estimation of the expected number of accidents. Accident Analysis & Preven-
tion, 18, 1986.
Ezra Hauer. Observational Before-After Studies in Road Safety. Emerald Group Publishing Limited,
1997.
Ezra Hauer, Douglas W. Harwood, Forrest M. Council, and Michael S. Griffith. Estimating safety
by the empirical bayes method: A tutorial. Transportation Research Record, 1784, 2002.
Scott Himes, Frank Gross, Kimberly Eccles, and Bhagwant Persaud. Multistate safety evaluation
of intersection conflict warning systems. Transportation Research Record, 2583(1), 2016.
Alena Høye. Still red light for red light cameras? an update. Accident Analysis and Prevention,
55, 2013.
Weimin Jin, Mashrur Chowdhury, Sakib Mahmud Khan, and Patrick Gerard. Investigating the
impacts of crash prediction models on quantifying safety effectiveness of adaptive signal control
systems. Journal of Safety Research, 76, 2021.
Soyoung Jung, Shinhye Joo, and Cheol Oh. Evaluating the effects of supplemental rest areas on
freeway crashes caused by drowsy driving. Accident Analysis & Prevention, 99, 2017.
Mubassira Khan, Ahmed Abdel-Rahim, and Christopher J. Williams. Potential crash reduction
benefits of shoulder rumble strips in two-lane rural highways. Accident Analysis & Prevention,
75, 2015.
19
Zulqarnain H. Khattak, Mark J. Magalotti, and Michael D. Fontaine. Estimating safety effects of
adaptive signal control technology using the empirical bayes method. Journal of Safety Research,
64, 2018.
Myunghoon Ko, Srinivis Reddy Geedipally, Troy Duane Walden, and Robert Carl Wunderlich.
Effects of red light running camera systems installation and then deactivation on intersection
safety. Journal of Safety Research, 62, 2017.
Robert J. LaLonde. Evaluating the econometric evaluations of training programs using experimental
data. The American Economic Review, 76, 1986.
Thanh Q. Le, Frank Gross, and Timothy Harmon. Safety effects of low-cost systemic safety improve-
ments at signalized and stop-controlled intersections. Transportation Research Record: Journal
of the Transportation Research Board, 2636, 2017.
Alfonso Montella. A comparative analysis of hotspot identification methods. Accident Analysis &
Prevention, 42, 2010.
Alfonso Montella, Bhagwant Persaud, Mauro D’Apuzzo, and Lella Liana Imbriani. Safety evaluation
of automated section speed enforcement system. Transportation Research Record: Journal of the
Transportation Research Board, 2281, 2012.
Alfonso Montella, Lella Liana Imbriani, Vittorio Marzano, and Filomena Mauriello. Effects on speed
and safety of point-to-point speed enforcement systems: Evaluation on the urban motorway a56
tangenziale di napoli. Accident Analysis & Prevention, 75, 2015.
Farhana Naznin, Graham Currie, Majid Sarvi, and David Logan. An empirical bayes safety evalua-
tion of tram/streetcar signal and lane priority measures in melbourne. Traffic Injury Prevention,
17, 2016.
North Central Texas Council of Governments. Historical traffic counts, 2016. URL http://www.
nctcog.org/trans/data/trafficcounts/indexcdp.asp.
Eun Sug Park, Paul J. Carlson, Richard J. Porter, and Carl K. Anderson. Safety effects of wider
edge lines on rural, two-lane highways. Accident Analysis & Prevention, 48, 2012.
Eun Sug Park, Paul J. Carlson, and Adam Pike. Safety effects of wet-weather pavement markings.
Accident Analysis & Prevention, 133, 2019.
Juneyoung Park and Mohamed Abdel-Aty. Development of adjustment functions to assess combined
safety effects of multiple treatments on rural two-lane roadways. Accident Analysis & Prevention,
75, 2015.
20
Juneyoung Park, Mohamed Abdel-Aty, and Chris Lee. Exploration and comparison of crash mod-
ification factors for multiple treatments on rural multilane roadways. Accident Analysis & Pre-
vention, 70, 2014.
Juneyoung Park, Mohamed Abdel-Aty, and Jaeyoung Lee. Use of emperical and full bayes before-
after approaches to estimate the safety effects of roadside barriers with different crash conditions.
Journal of Safety Research, 58, 2016.
Juneyoung Park, Mohamed Abdel-Aty, and Jung-Han Wang. Time series trends of the safety effects
of pavement resurfacing. Accident Analysis & Prevention, 101, 2017.
Ellan De Pauw, Stijn Daniels, Laurent Franckx, and Inge Mayeres. Safety effects of dynamic speed
limits on motorways. Accident Analysis & Prevention, 114, 2018.
Thomas Peel, Mohamed Ahmed, and Noriaki Ohara. Investigating safety effectiveness of wyoming
snow fence installations along a rural mountainous freeway. Transportation Research Record:
Journal of the Transportation Research Board, 2613, 2017.
Bhagwant Persaud, Bo Lan, Craig Lyon, and Ravi Bhim. Comparison of empirical bayes and full
bayes approaches for before-after road safety evaluations. Accident Analysis & Prevention, 42,
2010.
Bhagwant Persaud, Craig Lyon, Jeffrey Bagdade, and Andrew H. Ceifetz. Evaluation of safety per-
formance of passing relief lanes. Transportation Research Record: Journal of the Transportation
Research Board, 2348, 2013.
Srinivas S. Pulugurtha and Ramesh Otturu. Effectiveness of red light running camera enforcement
program in reducing crashes: Evaluation using “before the installation”, “after the installation”,
and “after the termination” data. Accident Analysis & Prevention, 64, 2014.
Moynur Rahman and Min-Wook Kang. Safety evaluation of drowsy driving advisory system: Al-
abama case study. Journal of Safety Research, 74, 2020.
Jonathan Roth, Pedro H.C. Sant’Anna, Alyssa Bilinski, and John Poe. What’s trending in
difference-in-differences? a synthesis of the recent econometrics literature. Journal of Econo-
metrics, August 2023.
Raghavan Srinivasan, Craig Lyon, Bhagwant Persaud, Jongdae Baek, Frank Gross, Sarah Smith,
and Carl Sundstrom. Crash modification factors for changes to left-turn phasing. Transportation
Research Record: Journal of the Transportation Research Board, 2279, 2012.
Robert Stein, Ned Levine, and Tim Lomax. Criteria for red light camera intersection selection,
2006.
21
Jillian Strauss, Luis F. Miranda-Moreno, and Patrick Morency. Mapping cyclist activity and injury
risk in a network combining smartphone gps data and bicycle counts. Accident Analysis &
Prevention, 83, 2015.
Jillian Strauss, Sohail Zangenehpour, Luis F. Miranda-Moreno, and Nicolas Saunier. Cyclist de-
celeration rate as surrogate safety measure in montreal using smartphone gps data. Accident
Analysis & Prevention, 99, 2017.
Xuesong Wang, Yilun Xing, Lian Luo, and Rongjie Yu. Evaluating the effectiveness of behavior-
based safety education methods for commercial vehicle drivers. Accident Analysis & Prevention,
117, 2018.
Jonathon Wood and Eric T. Donnell. Empirical bayes before-after evaluation of horizontal curve
warning pavement markings on two-lane rural highways in pennsylvania. Accident Analysis &
Prevention, 146, 2020.
Mingjian Wu, Karim El-Basyouny, and Tae J. Kwon. Before-and-after empirical bayes evaluation
of citywide installation of driver feedback signs. Transportation Research Record: Journal of the
Transportation Research Board, 2674, 2020.
Hao Yu, Pan Liu, Jun Chen, and Hao Wang. Comparative analysis of the spatial analysis methods
for hotspot identification. Accident Analysis & Prevention, 66, 2014.
Yingheng Zhang, Haojie Li, N.N. Sze, and Gang Ren. Propensity score methods for road safety
evaluation: Practical suggestions from a simulation study. Accident Analysis & Prevention, 158,
2021.
22
